数字电源UCD92xx 输出电压波形的优化
非线性增益,同时将Gain0 由1 修改为0.5;这可以降低环路的低频增益,最终降低环路带宽;2)将AFE 的Gain 由4 修改为1,同样可以降低环路带宽。1 倍的Gain 将使AFE 的输出的精度变差,并最终影响到输出电压,但考虑到软启动阶段对输出电压的精度要求略低,因此可以上述修改可以接受。
需要说明的是,为保证正常运行时输出电压的性能(精度,动态性能等),正常运行时对应的环路参数将保持不变。
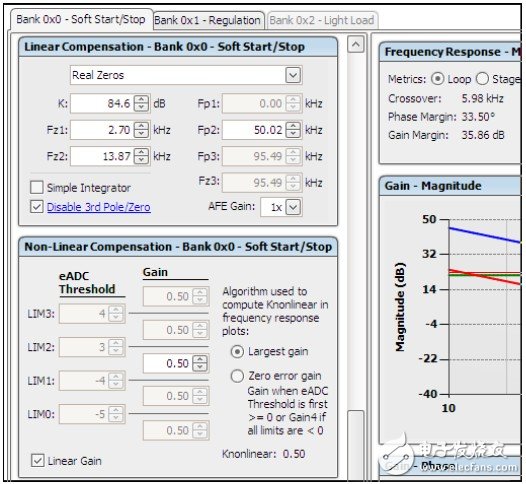
图 9:优化软启动环路参数
图10 所示的是优化环路后的输出电压波形,可以观察到在软启动阶段的"台阶"现象消失,波形平滑。
图11 是将时间轴展开后的输出电压波形,可以观察到其步进的时间依然是100us,步进的幅度为24mV(与理论值25mV 基本一致),但每一次的步进不再是突然增加,而是缓慢增加。因此,输出电压波形变得较为平滑。
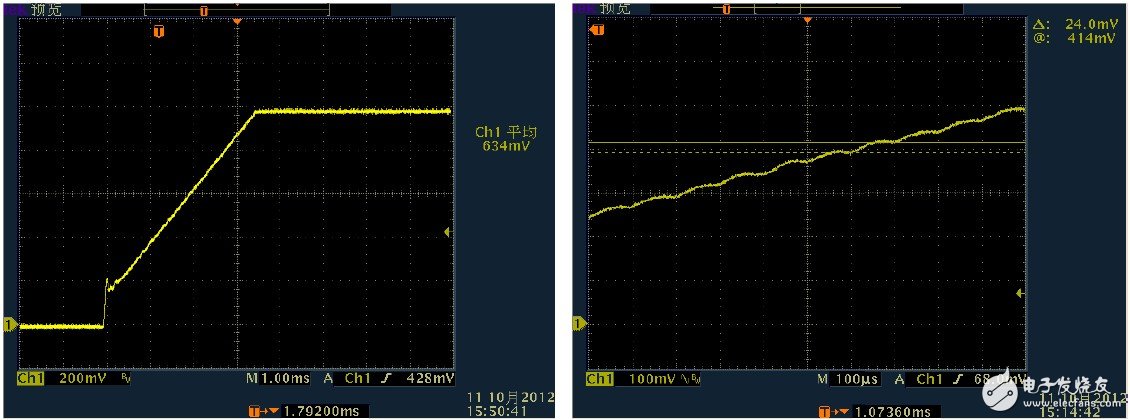
图 10:优化后的软启动波形 图 11:展开时间抽观察输出电压波形
但是,在图10 所示的波形中可以观察到,输出电压在启动时刻有一个正向过冲并很快回落。严格意义上,该过冲会影响输出电压波形的单调性,在一些应用场景中是不运行的。下文将针对该过冲进行优化。
3 调整最小驱动时间进一步优化输出波形
优化环路后输出电压在软启动阶段变得较为平滑,但会存在一个明显的过冲,需要进行优化。下文通过调整最小占空比宽度来消除该过冲。
3.1 数字电源软启动的kick-start
图12 中所示的是数字电源的输出电压软启动示意图。在开始时刻,输出电压有一个快速的上升,称之为"Kick-start"。 Kick-start 的幅度是根据下面公式计算出的:
Vstart =Vin×DRIVER_MIN_PULSE × Fsw
其中,DRIVER_MIN_PULSE 是指UCD92xx 发出的最小占空比的宽度,允许用户自行设定。
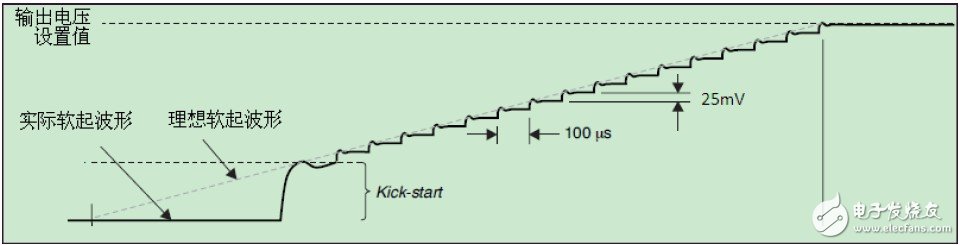
图 12:输出电压软启动
以图10 为例,输出电压Kick-start 的幅度约为185mV。其DRIVER_MIN_PULSE 设置为50ns,理论计算Kickstart的幅度为:12V×50ns×300KHz=180mV。实际值与理论值基本一致。
3.2 调整最小占空比宽度
将DRIVER_MIN_PULSE 由目前的50ns 修改为5ns,以验证其对输出电压的过冲有无改善。图13 即为输出电压波形,可以观察到过冲已经消失,但在起始时刻,输出电压不再平滑。
分析原因可知,当DRIVER_MIN_PULSE 设置为5ns 后,虽然UCD9224 可以发出宽度为5ns 的驱动脉冲,但UCD74120 对最小占空比的宽度有要求,5ns 的宽度不足以使集成在UCD74120 内部的buck 上管导通,从而造成了输出电压上升的不平滑。
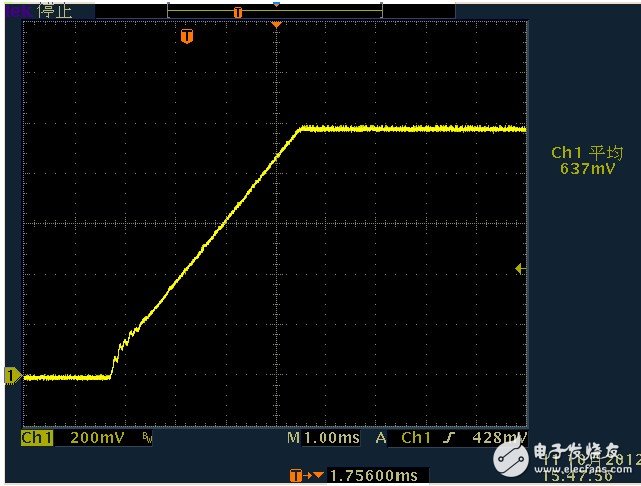
图 13:最小占空比宽度修改为5ns 后的输出电压波形
过小的DRIVER_MIN_PULSE 值会使输出电压在起始时刻变得不再平滑;过大的DRIVER_MIN_PULSE 的值则会带来正向过冲。因此,需要找到一个平衡点。
逐步增大DRIVER_MIN_PULSE 的值,当设置为43ns 时,达到了较为理想的平衡点,输出电压的波形如图14所示,输出不再有正向过程,而且在整个软启动阶段输出电压波形都比较平滑。
此时,输出电压Kick-start 的幅度约为160mV。其DRIVER_MIN_PULSE 为43ns,理论计算Kick-start 的幅度为:12V×43ns×300KHz=154.8mV。实际值与理论值基本一致。
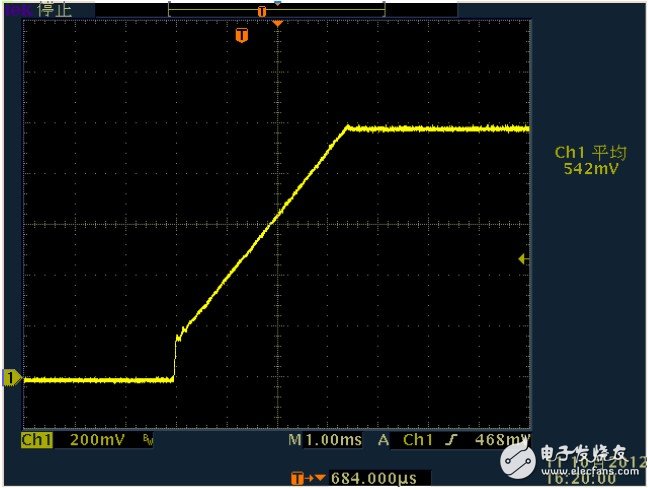
图 14:最终优化的输出电压波形
4 结论
通过修改AFE 的增益值和禁止非线性增益等措施优化软启动对应的环路参数后,可以消除输出电压的"台阶"现象,使波形单调平滑上升。正常运行的环路参数无需改动,保证了其较高的带宽,从而使输出电压的精度和动态响应等指标保持不变。
通过优化最小占空比的宽度,可以消除在kick-start 之后的正向过程,使输出电压波形单调平滑。
综上两类优化措施,最终可以使输出电压波形在整个软启动阶段单调平滑。
5 参考文献
1. UCD92xx-Design-Guide, Texas Instruments Inc., 2011
2. UCD9224 datasheet, Texas Instruments Inc., 2010
3. UCD74120 datasheet, Texas Instruments Inc., 2012
- 基于在线软件工具的数字电源UCD92xx反馈环路调试指南(06-17)
- 管理多电压轨系统让数字电源管理变得简单(08-17)
- 数字电源系统管理加快 “绿色”电子系统的上市时间(07-25)
- 数字电源设计与实现问题探讨(08-08)
- 系统设计师的数字电源(09-19)
- 数字回路控制电源转换的设计(01-31)