数字电源带来的设计变革参考
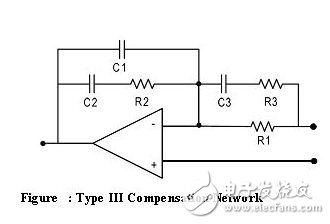
控制中,输出滤波电感器和电容器形成了闭环传递函数中的双极点。在高效电路里,这个双极点可能会变成一个复数共轭成对极点。一个Type III模拟补偿网络(图)通常用来对电压模式控制器进行补偿。糟糕的是,采用电阻和电容器实现的典型Type III补偿网络,只有一个实零点可以补偿受控器件的极点。如果没有出现对复数极点补偿不足的情况,实零点勉强能做些补偿。在Type III补偿网络中,用正值的电阻和电容器不可能实现复数共轭零点。工程师设法用有限的模拟补偿网络对电压模式控制器进行补偿,但在上面提到的情况下,是无法实现足够的补偿,从而会在这方面浪费大量的时间。
为什么改用数字电源?
假设我们必须从模拟控制转向其他技术,为什么数字控制是解决问题的办法呢?数字控制能解决问题,是因为它具有比模拟控制更好的性能、更灵活且在复杂的设计中更易用。数字控制发挥了模拟控制的优点,并超越模拟控制。
想象一下使用同样的电源元器件,包括相同的FET、电感器、电容器,把使用模拟控制器和数字控制的系统性能做个比较。起初,你自然会想到,既然性能是由元器件决定的,很难说性能会有什么差别。但接着你会意识到,控制器会影响到性能的很多方面。下面是一些例子。
1.瞬态响应:控制机制极大影响了系统的瞬态响应。例如,与电流模式相比,磁滞控制器的瞬态响应会有很大不同。每种控制模式都既有优点,也有缺点。数字解决方案让你能无缝地从一种模式转换到另一种模式,以提供最优的瞬态响应。虽然模拟解决方案可以提供很好的点方案,但极少出现足够静态的工作状况,让你能实现所设想的点方案。
2.调节精度:一般来说,调节精度是根据线电压、负载和温度来定义的,因为这些条件中的每一个都会影响调节精度。数字控制器可以监视这些条件,并采取控制措施,在整个工作条件范围内进行优化。
3.稳定性:数字控制能够提供比模拟方案更好的补偿(更好地调用极点和零点),因此在稳定性上的控制要好很多。另外,补偿能够随着条件的变化而变化,使系统能在很宽范围的条件下实现最佳的稳定性。模拟控制器的补偿是固定的,而数字控制可提供可调的甚至是自适应的补偿。
4.故障响应:数字电源控制器提供了大量故障响应的选项。每种故障都有唯一的响应特性,可根据用户的需求进行调整。模拟控制器一般只有一个固定的故障响应(如断电/断续/过载),用户也只能选择用或者不用。数字控制还能提供滤波器功能,降低虚假故障的可能。
5.效率:许多控制结果都会影响到效率,包括死区时间、开关频率、栅极驱动等级、二极管仿真、加相和缺相等。针对这些因素,当前数字控制所提供的数字控制算法在整个工作条件范围内进行了优化。因此,在某个工作点下,你也许能将模拟控制器调整到很高的效率,但数字控制器却可对所有的工作点进行优化。
6.可靠性:减少元件数量、降低工作温度(通过效率优化)是数字电源提高系统可靠性的两个途径。此外,灵活的故障响应和探测元器件参数微小变化的能力,可以大幅减少停机时间。
实际情况是,对大多数简单的设计和基本要求来说,数字控制可能有点大材小用。当然,数字电源控制的灵活程度足以应付这些简单的应用,其功能可能超出实际所需。另一方面,最复杂的设计需要完整的特性集,很难找到不增加很多电路就能胜任此项任务的模拟控制器。此时,数字控制器显然是备受欢迎的解决办法。
数字电源控制器适用于各种各样的应用,无需借助附加电路。从这个意义上说,这项技术的灵活性要远优于传统的模拟技术。
数字电源控制一般比模拟控制器具有更高的集成度。但是,集成度还不足以满足设计重用和灵活性的要求。元件数值也需要灵活可变。设想一下,一个典型模拟补偿器的补偿元件(电阻和电容器)被集成到控制器中,电阻和电容器的值是固定的。把这些元件集成进来,实际上降低了控制器的灵活性,除非采取某种办法,能够调节元件的数值,适应应用的要求。例如在数字控制器里,补偿器被集成到控制器中,补偿参数存放在控制器存储器中的数字寄存器当中。若要改变补偿参数,只需简单地改变寄存器里的数值。
数字电源控制器在易用性方面比模拟控制器更有优势。首先,由于数字电源控制的高集成度,需要确定、采购、跟踪的元器件数量要少很多,这使得数字电源控制器非常容易使用。其次,集成元件的数值由数字寄存器定义,寄存器里的数值可以很容易地通过器件的引脚或数字通信接口和图形用户界面进行修改。在后面的例子还将说明,对设计进
- 数字电源设计与实现问题探讨(08-08)
- 开关电源和模拟电源的区别(03-19)
- 如何实现绿色混合数字计算的电源管理(03-01)
- 浅谈模拟电源、开关电源、数字电源的区别(06-04)
- Microchip复合型电源转换方案:模拟与数字共存(02-17)
- 2016罗姆科技展都有哪些亮点?(11-13)