最实用的GPS接收器测试详解
真作业,以计算 LLA 的精确度与可重复性。请注意,由于在数个小时之内,可用的卫星讯号将持续变化,因此必须设定多种 TOW 以测试精确度 (如表13)。而表14 则表示其 LLA 信息。
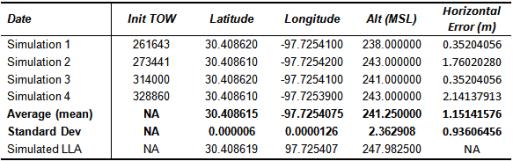
表14. 多项 TOW 仿真作业的水平精确度
在表14 中,可根据模拟的定位,计算出公尺为单位的水平错误。又如图 20 所示,可透过下列等式找出错误:

等式 17. 仿真 GPS 讯号的定位错误
而针对我们所使用的接收器而言,其水平定位最大误差为 5.2 公尺,水平定位平均误差为 1.5 公尺。而透过表8 所示,我们所使用的接收器均可达指定的限制之内。
如先前所述,接收器的精确度,与可用的卫星讯号密不可分。也就是说,接收器的精确度可能在数个小时内大幅变化 (卫星讯号改变),但是其可重复性却极小。为了确认我们的GPS 接收器亦为如此,则可针对特定的模拟 GPS 波形执行多项测试。此项作业主要是必须确认,RF 仪控并不会对仿真的 GPS 讯号产生额外的不确定性。如下方图 26 所示,当重复使用相同的二进制档案时,我们所使用的 GPS 接收器将得到极高可重复性的量测。
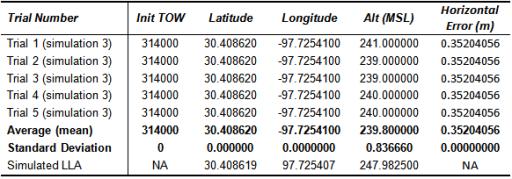
表15. 相同波形的各次测试,其误差亦具有极高的可重复性
回头再看表10,使用仿真 GPS 讯号的最大优点之一,即是可达到可重复的定位结果。由于此特性可让我们确认:所回报的定位信息,并不会因为设计迭代 (Iteration) 而发生变化,因此在开发的设计检验阶段中,此特性格外重要。
量测动态定位精确度
GPS 接收器测试的最后 1 种方法,即是量测接收器的追踪功能,使其在大范围的功率强度与速度中维持定位。在过去,此种测试 (往往亦为功能测试) 的常见方法之一,即是整合驱动测试与多路径衰减 (Multi-path fading) 模拟。在驱动测试 (Drive test) 中,我们使用可导入大量讯号减损 (Impairment) 的已知路径,驱动原型接收器。由于驱动测试是将自然减损套用至 GPS 卫星讯号的简单方法,因此这些量测往往亦不可重复。事实上,如GPS 卫星移动、天气条件的变化,甚至年度时间 (Time of year) 的因素,均可影响接收器的效能。
因此,目前有 1 种逐渐普及的方法,即是于驱动测试上记录 GPS 讯号,以大量讯号减损检验接收器效能。若要进一步了解设定 GPS 记录系统的方法,请参阅前述章节。而在驱动测试方案中,有多款 PXI 机箱可供选择。最简单的方式,即是使用 DC 机箱并以汽车电池进行供电。其次可使用标准的 AC 机箱,搭配转换器即可使用汽车电池供电。在此 2种选项中,DC 机箱的耗电量较低,但亦较难以于实验室中供电。如下列所示的标准 AC 机箱使用结果,其所供电的系统则包含 1 组外接的车用电池,与 1 组 DC to AC 转换器。
一旦我们完成 GPS 讯号的记录作业,即可透过相同的测试数据重复测试接收器。在下方的说明中,我们追踪接收器的经度、纬度,与速度。透过串行端口与每秒 1 次的 NMEA-183 指令读取速率,从接收器读取所需的数据。在下方量测中,我们所呈现的接收器特性参数,仅有定位与卫星 C/N 值。请注意,在执行这些量测作业的同时,亦可分析其他信息。虽然下列结果中并未量测水平精确度衰减 (Horizontal dilution of precision,HDOP),但此特性参数亦可提供大量的接收器定位精确度信息。
若要获得最佳结果,则应确实同步化接收器与 RF 产生作业的指令接口。下方所示结果中,我们将 COM 埠 (pin 2) 的数据信道做为开始触发器,以针对RF 向量讯号产生器与GPS 模块进行同步化。此同步化方式仅需任意波形产生器的 1 个频率循环 (100 MS/s),即可进行向量讯号产生器与 GPS 接收器的同步化。因此最大的歪曲 (Skew) 应为 10µS。并请注意,因为我们将取得接收器的经纬度,所以由同步化作业所造成的精确度错误,将为 10µs 乘以 Max Velocity (m/s),或为 0.15 mm。
使用上述的设定,我们即可按时取得接收器的经纬度。结果即如下图所示:
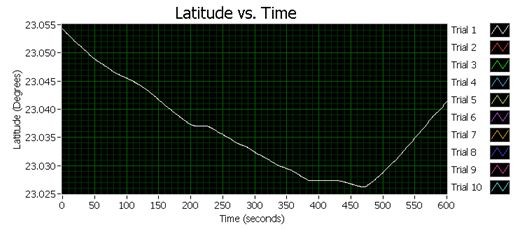
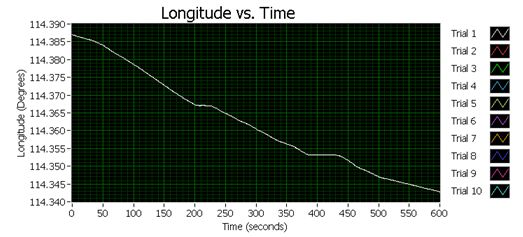
图12. 每 4 分钟所得到的接收器经纬度
在图12所呈现的数据中,即使用已记录的驱动测试讯号,取得统计、定位,与速度的相关信息。此外我们可观察到,在每次的测试之间,此项信息具有相对的可重复性;即为每个独立轨迹所呈现的差异。事实上,这就是我们最需要的接收器可重复性 (Repeatability)。由于可重复性信息将可预估 GPS 接收器精确度的变化情形,因此我们亦可计算波形各个样本之间的标准误差。在图 29 中,我们在各次同步化取样作业之间,绘出标准的定位误差 (相对于平均位置)。
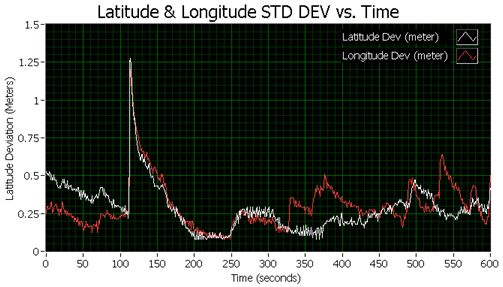
图 13. 依时间取得的经度
- 基于暂态行波法的配电网故障定位装置研究(02-01)
- 车载GPS导航仪供电方式深度解析(04-17)
- 基于GPS定位的嵌入式系统在汽车监控器设计中的应用(04-16)
- 车用影音及GPS技术发展与应用(10-13)
- GPS集中差分技术在城市车辆智能交通管理中的应用(04-16)
- 根据GPS全球定位技术在医疗监护装置中的应用(03-21)