伺服放大器的原理图解,伺服放大器原理图、参数要求及其输出电流的计算
伺服放大器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
伺服放大器作用是将输入指令信号(电压)同系统反馈信号(电压)进行比较、放大和运算后,输出一个与偏差电压信号成比例的控制电流给伺服阀力矩马达控制线圈,控制伺服阀阀芯开度大小,并起限幅保护作用。

伺服放大器作用与原理
伺服放大器的作用是将多个输入信号与反馈信号进行综合并加以放大,根据综合信号极性的不同,输出相应的信号控制伺服电机正转或反转。当输入信号和反馈信号相平衡时,伺服电机停止转动,执行机构输出轴便稳定在一定位置上。
伺服放大器组要由前置磁放大器、触发器、晶闸管主回路和电源等部分组成,其组成如下图所示。
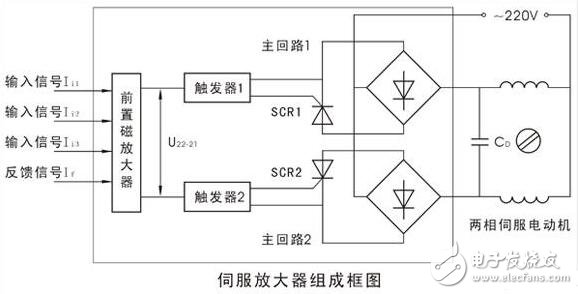
为适应复杂的多参数调节的需要,伺服放大器设置由三个输入信号通道和一个位置反馈信号通道。因此,它可以同时输入三个输入信号和一个位置反馈信号。在单参数的简单调节系统中,只使用其中一个输入通道和反馈通道。
在伺服放大器中,前置磁放大器把三个输入信号和一个反馈信号综合为偏差信号,并放大为电压信号U22-21输出。此输出电压同时经触发器1(或2)转换成触发脉冲去控制晶闸管主回路1(或2)的晶闸管导通,从而将交流220V电源加到两相伺服电机绕组上,驱动两相伺服电动机转动。当△1》0时,U22-21》0,触发器2和主回路2工作,两相伺服电机正转;当△1《0时,,触发器1和主回路1工作,两相伺服电机反转;两组触发器和两组晶闸管主回路的电路组成及参数完全相同,所以当输入信号和与位置反馈电流If相平衡,前置磁放大器的输出U22-21≈0,两触发器均无触发脉冲输出,主回路1和2中的晶闸管阻断,两相伺服电动机的电源断开,电动机停止转动。
由此可见,伺服放大器相当于一个三位式无触点继电器,并具有很大的功率放大能力。
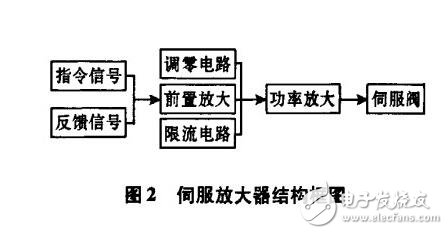
伺服放大器由指令和反馈比较处理、调零电路、限流电路、前置放大、功率放大等功能模块组成,其结构框图如图2所示。
伺服放大器的具体电路原理图如图3所示。
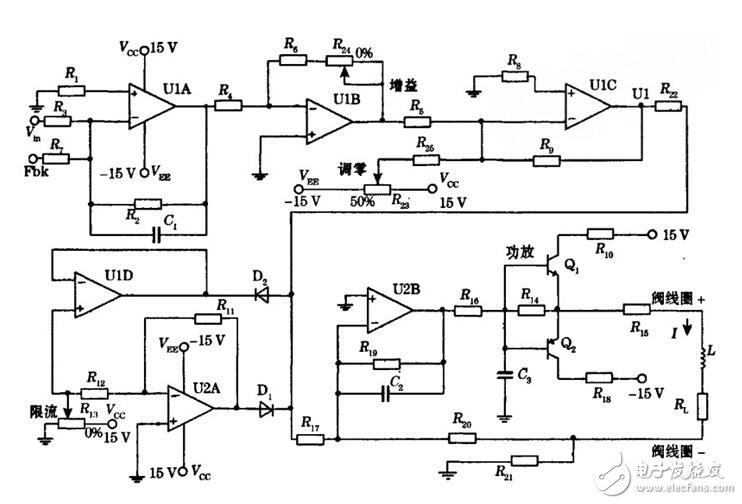
前置放大电路的作用是把指令和反馈输入信号进行比较和放大。该电路K。、Fbk分别为输入信号和反馈信号,通过电位器j匕调节电路增益,使其适应功率放大电路的要求,使电路电压前后级达到匹配。调零电路的作用是通过在前置放大电路叠加可调电压,调整电路基准电压。通过调节电位器如进行零偏补偿,克服伺服放大器系统偏置。
限流电路的作用是限定流过伺服阀线圈的最大电流,避免线圈过载,保护伺服阀,限制液压系统最大流量。该电路由运放ulD、U2A,二极管D。、D:和可调电压源构成,通过电位器R。,调节功率放大级的输入电压的幅度,达到限定输出电流目的。功率放大电路的作用是将小功率电压信号转换放大为功率较大的电流信号,以便提供足够的伺服阀额定电流,以驱动负载。并且要求有良好的抗干扰能力和静、动态性能,该电路利用NPN和PNP型三极管的基极和发射级相互连接在一起,信号从基极输入,发射极输出。电路可看成由2个射极输出器组合而成,构成推挽功率放大电路,分别在输入信号正负半周期内工作。另外,还可在输出电流中叠加一个由8038芯片产生的高频颤振信号,以提高伺服阀分辨率和防止由于库仑摩擦力导致的阀芯卡滞。
伺服放大器参数要求
伺服放大器作为驱动电液伺服阀的一种电子设备,相应参数有一定要求:
(1)输入电压在±lO V内,方便计算机和可编程控制器等指令元件实现控制;
(2)输出电流±10一±100 n认可调,以便适应各种型号力矩马达伺服阀;
(3)伺服放大器线性度误差小于3%Fs;
(4)具有反馈接入端,以便构成闭环控制系统;
(5)为适应伺服系统高频响的特性,伺服放大器频宽大于l 200 Hz;
(6)具有最大输出电流限制和输出短路保护功能,可限制伺服阀最大流量和防止输出线路短接导致故障。

伺服放大器的输出电流计算
伺服阀线圈为伺服放大器的负载,相当0.3 H电感和80 Q电阻组成的感性阻抗,为了使功率级的输出控制电流正比于输入电压信号,采用了电阻如。与负载线圈串联,并将其上电压经电阻如反馈到放大器的反相输入端,实现闭环控制,精确调整功率级输出电流。因为功率级反馈电压是由电流产生的,故称为电流负反溃引入电流负反馈以后,在额定负载范围内,负
- 三菱电机伺服系统过载报警消除的方法(07-02)
- 伺服运动控制系统及数控加工原理及应用(05-29)
- 基于PLC和脉冲伺服在枕式包装机上的应用(07-12)
- 单轴伺服驱动系统在排线装置中的应用(06-17)
- 东能伺服在绕线机上应用(04-28)
- BWS注塑型伺服驱动器在注塑机中的应用(10-29)