伺服电机的制动方式与原理,伺服电机的控制方法
伺服电动机又叫执行电动机,或叫控制电动机。在自动控制系统中,伺服电动机是一个执行元件,它的作用是把信号(控制电压或相位)变换成机械位移,也就是把接收到的电信号变为电机的一定转速或角位移。其容量一般在 0.1-100W, 常用的是 30W 以下。伺服电动机有直流和交流之分。

伺服电机的制动方式及其原理
1、电气制动法:
(1) 动态制动器(又称能耗制动)由动态制动电阻组成,在故障、急停、电源断电时通过能耗制动缩短伺服电机的机械进给距离。
(2) 再生制动(又称回馈制动)是指伺服电机在减速或停车时将制动产生的能量通过逆变回路反馈到直流母线,经阻容回路吸收。
2、机械制动法
电磁制动是通过机械装置锁住电机的轴。 用户往往对电磁制动、再生制动、动态制动的作用混淆,选择了错误的配件。

动态制动器由动态制动电阻组成,在故障、急停、电源断电时通过能耗制动缩短伺服电机的机械进给距离。
动态制动器由动态制动电阻组成,在故障,急停,电源断电时通过能耗制动缩短伺服电机的机械进给
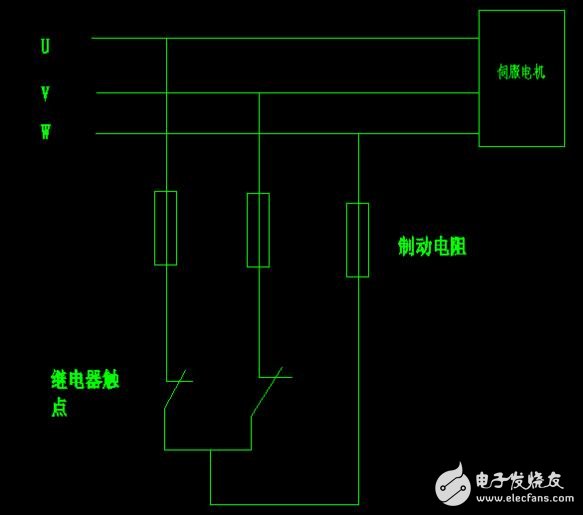
一般都是在伺服电机的U V W相上引出三根线上面分别串上一个制动电阻,这三个电阻接到一个继电器上 ,在伺服电机正常工作时这个继电器是吸合的三个相线不短接 当伺服电机要制动时 继电器就断电释放三个相线接到一起了就开始制动了。
再生制动是指伺服电机在减速或停车时将制动产生的能量通过逆变回路反馈到直流母线。经阻容回路吸收。
电磁制动是通过机械装置锁住电机的轴。
三者的区别:
(1)再生制动必须在伺服器正常工作时才起作用,在故障、急停、电源断电时等情况下无法制动电机。动态制动器和电磁制动工作时不需电源。
(2)再生制动的工作是系统自动进行,而动态制动器和电磁制动的工作需外部继电器控制。
(3)电磁制动一般在SV OFF后启动,否则可能造成放大器过载。动态制动器一般在SV OFF或主回路断电后启动,否则可能造成动态制动电阻过热。
选择配件的注意事项:
(1) 有些系统如传送装置,升降装置等要求伺服电机能尽快停车。而在故障、急停、电源断电时伺服器没有再生制动无法对电机减速。同时系统的机械惯量又较大,这时需选用动态制动器动态制动器的选择要依据负载的轻重,电机的工作速度等。
(2) 有些系统要维持机械装置的静止位置需电机提供较大的输出转矩且停止的时间较长,如果使用伺服的自锁功能往往会造成电机过热或放大器过载。这种情况就要选择带电磁制动的电机。
(3) 三菱的伺服器都有内置的再生制动单元,但当再生制动较频繁时可能引起直流母线电压过高,这时需另配再生制动电阻。再生制动电阻是否需要另配,配多大的再生制动电阻可参照样本的使用说明。需要注意的是样本列表上的制动次数是电机在空载时的数据。实际选型中要先根据系统的负载惯量和样本上的电机惯量,算出惯量比。再以样本列表上的制动次数除以(惯量比+1)。这样得到的数据才是允许的制动次数。
伺服电机的控制方法
伺服电机是一种补助马达加速的设备,伺服机电控制速度、位置非常准确。伺服机电就是闭环控制器控制的电机,比普通电机多个编码器反馈,能够根据给定和反馈来计算输出目标值,控制电机的运动速度及位移的机械。通常伺服机电的控制方法有:
伺服电机一般为三个环控制,所谓三环就是3个闭环负反馈PID调节系统。最内的PID环就是电流环,此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行PID调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
第2环是速度环,通过检测的电机编码器的信号来进行负反馈PID调节,它的环内PID输出直接就是电流环的设定,所以速度环控制时就包含了速度环和电流环,换句话说任何模式都必须使用电流环,电流环是控制的根本,在速度和位置控制的同时系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制。
第3环是位置环,它是最外环,可以在驱动器和电机编码器间构建也可以在外部控制器和电机编码器或最终负载间构建,要根据实际情况来定。由于位置控制环内部输出就是速度环的设定,位置控制模式下系统进行了所有3个环的运算,此时的系统运算量最大,动态响应速度也最慢。

1.转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,
- 如何有效提高机器人伺服电机的过载能力?(09-24)
- 伺服系统的特点、分类及发展方向(03-09)
- 伺服电机内部结构及其工作原理(04-04)
- 异步伺服电机和同步伺服电机的区别(07-26)
- 伺服电机做负载的优势(10-26)
- 机器人是怎样上春晚的(02-17)