什么是步进电机?步进电机的基本参数、结构及其原理,步进电机的特点特性
步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为"步距角"),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。

现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;
反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
混合式步进电机是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用最为广泛,也是本次细分驱动方案所选用的步进电机。
步进电机的结构及其原理
步进电机是一种同步电机,其结构同其它电机一样,由定子和转子组成,定子为激磁场,其激磁磁场为脉冲式,即磁场以一定频率步进式旋转,转子则随磁场一步一步前进。步进电机主要有 反应式、电磁式、永磁式几种。下面以反应式步进电机为例,来讨论其工作原理:
步进电机由转子和定子两部分组成。转子和定子均由带齿的硅钢片叠成。定子上有绕组分为若干相,每相磁极上有极齿。当某相定子绕组通以直流电压激磁后,便吸引转子,使转子上的齿与该相定子的齿对齐,令转子转动一定的角度,依次向定子绕组轮流激磁,会使转子连续旋转。
步进电机的定子可以做成三、四、五、六相甚至于做成八相,各相绕组可在定子上径向排列,也可在定子的轴向上分段排列。
下面的FLASH为步进电机的工作原理动画演示,所选示例为单定子径向分相式反应步进电机的断面图。转子上有均匀分布的40个齿,没有绕组。A、B、C 三相定子每相两极,每极上有5个齿,与转子一样齿间夹角均为9°。如果A 相通电则转子齿与A 相极齿对齐,这时在B 相两极下定子齿与转子齿中心线并不对齐,而是转子齿中心线较定子齿中心线反时针方向落后1/3齿距,即3°。C 相下,转子齿超前6°。因此,当通电状态由A 相变为B 相时,转子顺时针方向转过3°,C 相通电再转3°。步距角为

双拍通电激磁,即按A-AB-B-BC-C-CA-A……的顺序通电激磁,则步距角为

一般而言

式中:m——绕组相数;
z——转子齿数,单拍通电kp=1,双拍通电kp=2。如果按上述相反的方向通电,则步进电机将反时针方向旋转。
图1所示为五相五定子轴向分相反应式步进电机。定子和转子都分为5段,呈轴向布置。其上均有16个齿,故齿距为22.5°,各相定子彼此径向错开1/5个齿的齿距(也可以由五段转子彼此径向错开1/5齿距)。如果按A-B-C-D-E-A……的五相五拍通电,步距角为

如果按AB-ABC-BC-BCD-CD-CDE-DE-DEA-EA-EAB-AB……的十拍通电,则步距角为2.25°。
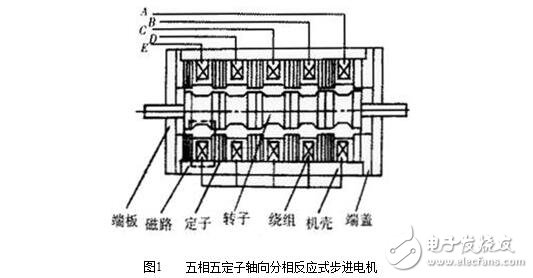
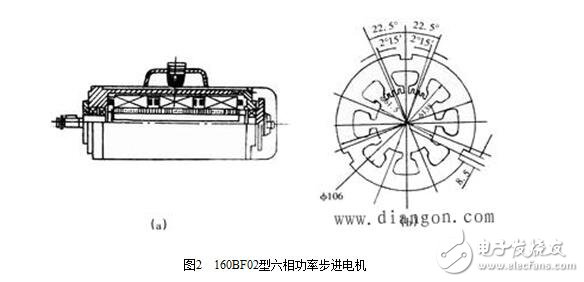
图2(a)为160BF02型六相功率步进电机,电机的转子有40个齿,不分段由硅钢片叠成。步距角可以是1.5°或0.75°。电机的定子如图(b)所示由硅钢片叠成分为三段,每段有8个磁极,单数极属于同一相,双数极属于另一相,极齿的齿夹角也是360°/40=9°,每段上的两相磁极的极齿彼此便错开4.5°。三段定子装入机壳内时,三段上的记号槽相互径向错开120°,因而三段上三个均布键槽对齐,在键槽中用键固定。这样装配后,段与段之间的极齿便错开1.5°,如果第一段的两相为A、D相,则第二段为B、E相,第三段为C、F相。功率步进电机的输出转矩大,绕组上的电流大。结构上采用径向与轴向分相相结合的形式,径向尺寸小,惯性小,散热好,而且没有磁漏。
步进电机的基本参数
电机固有步距角:
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)