机器人要多少传感器才能如人类般灵敏?
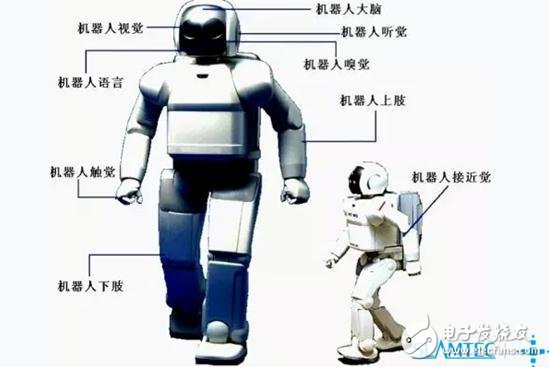
如今的机器人已具有类似人一样的肢体及感官功能,有一定程度的智能,动作程序灵活,在工作时可以不依赖人的操纵。而这一切都少不了传感器的功劳,传感器是机器人感知外界的重要帮手,它们犹如人类的感知器官,机器人的视觉、力觉、触觉、嗅觉、味觉等对外部环境的感知能力都是由传感器提供的,同时,传感器还可用来检测机器人自身的工作状态,以及机器人智能探测外部工作环境和对象状态。并能够按照一定的规律转换成可用输出信号的一种器件,为了让机器人实现尽可能高的灵敏度,在它的身体构造里会装上各式各样的传感器,那么机器人究竟要具备多少种传感器才能尽可能的做到如人类一样灵敏呢?
根据检测对象的不同可将机器人用传感器分为内部传感器和外部传感器。
内部传感器主要用来检测机器人各内部系统的状况,如各关节的位置、速度、加速度温度、电机速度、电机载荷、电池电压等,并将所测得的信息作为反馈信息送至控制器,形成闭环控制。
而外部传感器是用来获取有关机器人的作业对象及外界环境等方面的信息,是机器人与周围交互工作的信息通道,用来执行视觉、接近觉、触觉、力觉等传感器,比如距离测量、声音、光线等。
具体介绍如下:
1、视觉传感器
机器视觉是使机器人具有感知功能的系统,其通过视觉传感器获取图像进行分析,让机器人能够代替人眼辨识物体,测量和判断,实现定位等功能。业界人士指出,目前在中国使用简便的智能视觉传感器占了机器视觉系统市场60%左右的市场份额。视觉传感器的优点是探测范围广、获取信息丰富,实际应用中常使用多个视觉传感器或者与其它传感器配合使用,通过一定的算法可以得到物体的形状、距离、速度等诸多信息。
以深度摄像头为基础的计算视觉领域已经成为整个高科技行业最热门的投资和创业热点之一。有意思的是,这一领域的许多尖端成果都是由初创公司先推出,再被巨头收购发扬光大,例如Intel收购RealSense实感摄像头、苹果收购Kinect的技术供应商PrimeSense,Oculus又收购了一家主攻高精确度手势识别技术的以色列技术公司Pebbles Interfaces。在国内计算视觉方面的创业团队虽然还没有大规模进入投资者的主流视野,但当中的佼佼者已经开始取得了令人瞩目的成绩。
深度摄像头早在上世纪 80 年代就由 IBM 提出相关概念,这家持有过去、现在和未来几乎所有硬盘底层数据的超级公司,可谓是时代领跑者。2005年创建于以色列的 PrimeSense 公司可谓该技术民用化的先驱。当时,在消费市场推广深度摄像头还处在概念阶段,此前深度摄像头仅使用在工业领域,为机械臂、工业机器人等提供图形视觉服务。由它提供技术方案的微软Kinect成为深度摄像头在消费领域的开山之作,并带动整个业界对该技术的民用开发。
2、声觉传感器
声音传感器的作用相当于一个话筒(麦克风)。它用来接收声波,显示声音的振动图象。但不能对噪声的强度进行测量。声觉传感器主要用于感受和解释在气体(非接触感受)、液体或固体(接触感受)中的声波。声波传感器复杂程度可以从简单的声波存在检测到复杂的声波频率分析,直到对连续自然语言中单独语音和词汇的辨别。

据悉,从20世纪50年代开始,BELL实验室开发了世界上第一个语音识别Audry系统,可以识别10个英文数字。 到20世纪70年代声音识别技术得到快速发展,动态时间规整(DTW)算法、矢量量化(VQ)以及隐马尔科夫模型(HMM)理论等相继被提出,实现了基于DTW技术的特定 人孤立语音识别系统。近年来,声音识别技术已经从实验室走向实用,国内外很多公司都利用声音识别技术开发出相应产品。比较知名的企业有思必驰、科大讯飞以及腾讯、百度等巨头,共闯语音技术领域。
3、距离传感器
用于智能移动机器人的距离传感器有激光测距仪(兼可测角)、声纳传感器等,近年来发展起来的激光雷达传感器是目前比较主流的一种,可用于机器人导航和回避障碍物,比如SLAMTEC-思岚科技研发的RPLIDAR A2激光雷达可进行360度全方面扫描测距,来获取周围环境的轮廓图,采样频率高达每秒4000次,成为目前业内低成本激光雷达最高的测量频率。配合SLAMTEC-思岚科技的SLAMWARE自主定位导航方案可帮助机器人实现自主构建地图、实时路劲规划与自动避开障碍物。
4、触觉传感器
触觉传感器主要是用于机器人中模仿触觉功能的传感器。触觉是人与外界环境直接接触时的重要感觉功能,研制满足要求的触觉传感器是机器人发展中的技术关键之一。随着微电子技术的发展和各种有
- 解密英伟达Tesla P100、GP100、DRIVE PX2平台(04-26)
- 人工智能处理器三强Intel/NVIDIA/AMD谁称霸?(07-23)
- 2016年人工智能与深度学习领域的十大收购(07-26)
- 人工智能实现的流派 FPGA vs. ASIC看好谁?(08-27)
- IBM沃森能否在人工智能领域突破重围?(09-19)
- 英特尔与高通将在汽车芯片市场再次对决(上)(10-03)