智能机器人三大关键技术详解
格到目标栅格无碰撞的最优路径.这其中根据栅格处理方法的不同,又分为精确栅格法和近似栅格法,后者也称概率栅格法。精确栅格法是将自由空间分解成多个不重叠的单元,这些单元的组合与原自由空间精确相等,如下图就是常用的一种精确栅格分解法一一梯形栅格分解。
与精确栅格法不同,近似栅格法的所有栅格都是预定的形状,通常为矩形,整个环境被分割成多个较大的矩形,每个矩形之间都是连续的,典型的方法是"四叉树"法,如果大矩形内部包含障碍物或者边界,则将其分割成4个小矩形,对所有稍大的栅格都进行这种划分,然后在划分的最后界限内形成的小栅格间重复执行该程序,直到达到解的界限为止。
地图构建法直观明了,它常与其他路径规划方法集成使用,如Araujo提出的ART神经网络的地图构建路径规划算法,Najjaran提出的卡尔曼滤波器的地图构建路径规划,Yang等提出的基于生物启发神经网络与地图构建集成的清洁机器人完全覆盖路径规划技术(CCPP)等。
目前,地图构建技术已引起机器人研究领域的广泛关注,成为移动机器人路径规划的研究热点之一,但机器人传感器信息资源有限,使得网格地图障碍物信息很难计算与处理,同时由于机器人要动态快速地更新地图数据,在网格数较多、分辨率较高时难以保证路径规划的实时性,因此,地图构建方法必须在地图网格分辨率与路径规划实时性上寻求平衡。
4.人工智能路径规划技术
人工智能路径规划技术是将现代人工智能技术应用于移动机器人的路径规划中,如人工神经网络、进化计算、模糊逻辑与信息融合等。遗传算法是最早应用于组合优化问题的智能优化算法,该算法及其派生算法在机器人路径规划研究领域已得到应用,在蚁群算法较好解决旅行商问题(TSP)的基础上,许多学者进一步将蚁群优化算法引入到水下机器人(UV)的路径规划研究中。
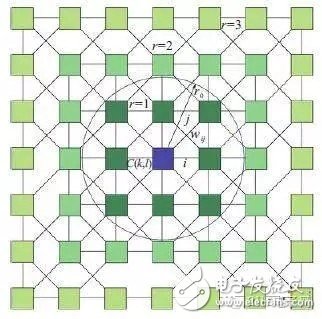
神经网络作为人工智能的重要内容,在移动机器人路径规划研究中得到了广泛关注,如Ghatee等将Hopfield神经网络应用到路径距离的优化中;Zhu等将自组织SOM神经网络应用到多任务多机器人的任务分配与路径规划中,近年来加拿大学者Simon提出一种新的生物启发动态神经网络模型,将神经网络的神经元与二维规划空间的离散坐标对应起来,通过规定障碍物和非障碍物对神经元输入激励和抑制的不同,直接计算相关神经元的输出,由此判定机器人的运行方向,由于该神经网络不需要学习训练过程,路径规划实时性好,同时利用神经网络本身的快速衰减特性,较好地解决了机器人路径规划的死区问题。如图为用于局部路径规划的生物启发神经网络结构图,图中所示为机器人(处于神经元处)传感器的感受半径,每个神经元与环境位置坐标对应,动态计算机器人邻近神经元输出,机器人根据神经元输出大小决定下一步运行目标,从而实现安全的路径规划。
人工智能技术应用于移动机器人路径规划,增强了机器人的"智能"特性,克服了许多传统规划方法的不足,但该方法也有不足之处,有关遗传优化与蚁群算法路径规划技术主要针对路径规划中的部分问题,利用进化计算进行优化处理,并与其他路径规划方法结合在一起使用,单独完成路径规划任务的情况较少。信息融合技术主要应用于机器人传感器信号处理方面,而非直接的路径规划策略,对神经网络路径规划而言,大多数神经网络路径规划均存在规划知识的学习过程,不仅存在学习样本难以获取,而且存在学习滞后问题,从而影响神经网络路径规划的实时性,生物启发神经网络路径规划虽然实时性较好,但其输入激励与抑制的设定也存在人为不确定因素。
基于生物启发神经网络路径规划
此外,智能机器人还用到机器人视觉、智能控制、人机接口技术等多种技术,小编就不一一赘述了,大家可以搜寻相关资料,一起分享哦。
智能机器人 相关文章:
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 萌萌哒的智能机器人前台(09-05)
- 工业机器人过去与现在对比(02-16)
- 大联大世平集团推出RK3288智能机器人解决方案(07-04)
- 基于蓝牙和DSP的家庭医疗保健智能机器人设计方案(07-04)
- 基于MCU的智能家居照护机器人的设计与实现(05-13)