无人机的飞行感知技术解析
时间:02-03
来源:EDN电子技术设计
点击:
传感器校准
传感器校准,包括精校准和粗校准。精校准效果比较好,但需要昂贵的标定设备;粗校准则不需要借助外部设备,只对传感器本身进行操作即可。
以磁罗盘的粗校准为例,由于地球上任意位置的地磁场强度在较长时间跨度内都可视为是恒定的,当转动磁罗盘时,根据相对运动可假设磁罗盘固定不动,而地磁场矢量随之在转动,其矢量端点在空间的轨迹应为一个标准的球体,但由于传感器存在误差,实际测出的数据并不严格都在球体的表面,这时候就需要根据测量出来的数值以及已知的准确值来计算两者之间的换算关系,也就是该款磁罗盘的误差模型。在以后使用该款磁罗盘时就可以根据粗校准得出的误差模型来处理测量值,使得测量值的误差减小。

磁罗盘校准(SGB sbgcenter)
多种传感器数据融合
不同类型的传感器数据融合方法有多种,在业内用的比较普遍而且效果也比较好的是EKF,也就是扩展卡尔曼滤波。
以计算飞机姿态角的融合方法为例,EKF更新过程主要分为两个部分,预测更新和量测更新。预测更新主要利用陀螺仪更新预测状态量,同时计算该状态量的协方差矩阵。在量测更新中先会计算滤波增益,然后使用滤波增益融合预测状态量、加速度计以及磁罗盘的数据,成为一个融合状态量,同时计算融合状态量的协方差矩阵,在下一次更新周期的计算中使用。
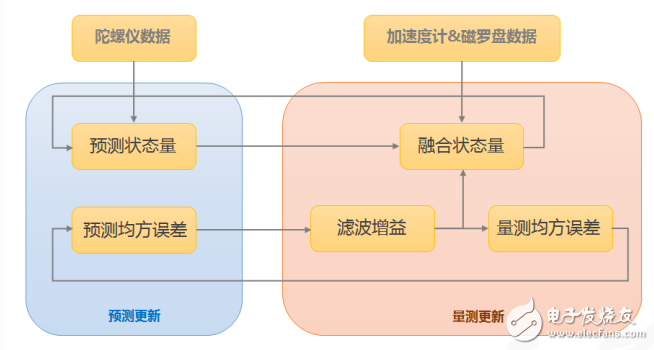
计算姿态角的融合方法流程
传感器冗余设计
传感器冗余设计主要是将多个同种传感器进行组合,处理方法是首先会剔除数据异常的传感器,然后再进行传感器的融合。冗余设计不仅可以提高测量精度也可以提高整套系统的可靠性,在某一个传感器失效的情况发生时,让整个系统能够继续正常工作。
- 农民伯伯乐开怀:无人机,机器人助阵大农场(02-23)
- 无人机高清影像实时压缩处理传输平台解决方案(03-22)
- 无人机应用于航空测绘的解决方案(03-22)
- 无人机竟能授粉?勤劳的小蜜蜂要哭了(03-28)
- 无人机配方向传感器可自行创建地图+规划路线(10-02)
- 智能电网:从电网人到电网机器人的改变(02-28)