仿人型机器人控制系统设计的几个问题
时间:10-08
来源:中国智能制造网
点击:
务模块的定时轮换机制[6]。共建立了3个模块任务:任务0用来解析送入该任务的软件代码值到PWM输出的转换。任务1用来调用每套动作编码,连续的将得到的软件值发送给任务0。任务2为串口处理任务,通过分析串口发来的数据进行模式的转换和响应。其程序流程图如图8所示。
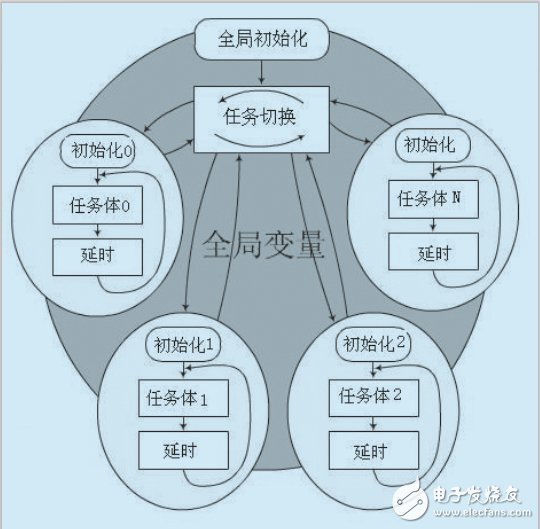
图8 程序流程图
4 系统调试效果
设计该仿人型机器人的走步步态时,主要考虑了机器人的自重为2.53Kg,身高为42cm,因此机器人的脚和手臂的舵机输出幅度不能太大,否则会导致机器人走步时的重心偏移太大,造成机器人翻倒。因此在设计机器人的脚掌时,适当增大了与地面的接触面积,脚掌的尺寸为8.5&TImes;15cm,同时加快了脚步移动的频率,并在脚部增加了额外的配重,以增强机器人在走步过程中的稳定性,其走步的步态如图9所示。该型机器人的走步步态协调一致,在2012年中国机器人大赛仿人竞速比赛项目中获得二等奖。

图9 12自由度的仿人型机器人
走步动作正面
5 结束语
文中基于STM32微控制器的仿人型机器人控制系统,能够灵活地控制16路大扭力舵机,通过大功率降压电源模块,可以得到16路舵机同时动作时所需要的直流电压,实现了仿人型机器人的走步动作,可作为高校学生进行机器人技术创新时的参考。
- 盘点STM32-NUCLEO开发与仿真平台(03-28)
- 一种基于ZigBee和STM32的室内智能照明系统的设计(05-13)
- 大联大友尚集团推出ST STM32马达控制Nucleo开发工具包,可直接开始运转无刷直流马达(05-27)
- 这些VR设备“内脏”构造大解剖!绝对有你没见过的(02-14)
- 在变频空调风机中永磁同步电机矢量控制方案的运用(04-04)
- 基于STM32和SIM900A的无线通信模块设计(10-07)