实现光通信的新手段:不只是照明的UV LED
由于紫外光的散射传播特性,UV LED的视场角和检测器的视场角重叠的区域越大,接收到的光能量就越多,接收信噪比就越高。考虑到系统选用的UV?LED的视场角只有10°,为了增大收发双方在存在视线遮挡情况下的重叠区域,需要通过光学透镜增大发送光源的视场角。凹透镜能够对入射光束起发散作用,如图2所示,所以通过多个凹透镜的组合并调节UV?LED和凹透镜的距离,就可以得到满足要求的发射视场角。
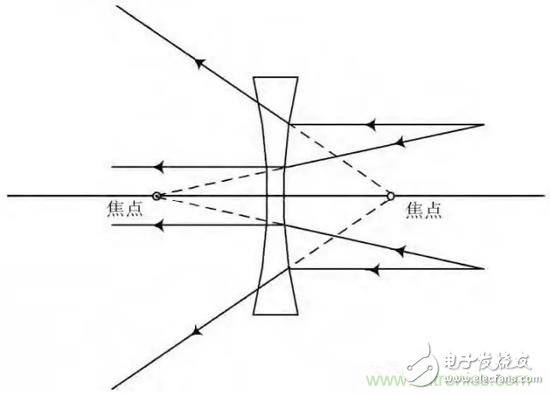
图2凹透镜典型光路示意图
(2)定时恢复
和常规的数字通信一样,接收端需要对检测器输出的电信号进行时钟恢复,并对最佳采样点进行判决。另一方面,由于调制方式采取的是2PPM,常规数字接收机中的载波恢复在这里并不需要。
时钟误差估计算法可采用经典的Gardner算法,这里不再赘述。
(3)扰码、信道编码
为了提高数据传输的抗干扰能力,可在系统中加入信道纠错编码。同时为了更好地进行定时恢复,还需对发送的数据进行加扰处理。这里使用的扰码多项式为x5+x3+1,信道纠错编码为(2,1,7)卷积码,其生成多项式为(171)o,133o。
(4)双工通信协议
在紫外通信系统中,由于紫外光源和检测器的波长是固定的,要想支持多个用户间的双向通信,采用时分复用的多址方式(TDMA)和载波侦听的接入方式(CSMA)是一种较好的选择。
对于一个用户容量为N的系统,一共设置N个时隙,每一个用户占用一个时隙。考虑到紫外光通信的范围通常在1km&TImes;1km以内,所以时隙之间的保护间隔可以设置得非常小。
以容量为10人的紫外光语音通信系统为例说明数据帧结构的设计。考虑到通常情况下人讲话的语速为每分钟160~180个汉字,在保留一定余量的情况下,假设每分钟240个汉字,如果压缩后的语音信号速率为4.8Kb/s,可以算出平均每个汉字时间内的比特数为1200b。据此设计的数据帧结构如图3所示,其中数据的信息速率为60Kb/s,信息体长度为1200b,时隙头长度为96b。时隙头包括前导序列、信息类型、发送方代号和接收方代号,长度分别为72b,8b,8b和8b。每一个用户只处理接收代号和自己的代号一致的时隙。收发双方作为一个组合占用相邻的两个时隙。前导序列为0,1交替的序列,信息类型的定义如表1所示。
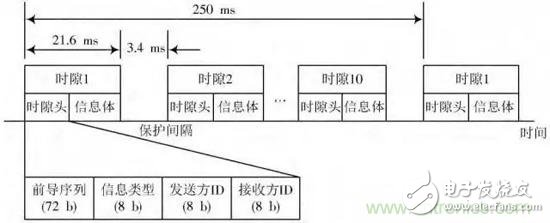
图3 数据帧结构设计

整个系统的工作流程如下:
用户接入:如果用户k需要发起和用户j的通信,首先监听时隙1~10,如果用户j处于忙状态,则等待;否则如果信道上有空闲时隙对,则利用该时隙对的前一个时隙进行接入申请,同时接收自己的申请信息。如果接收的信息和发送的信息一致,表明没有另外一个用户正在竞争该时隙,则可以占用该时隙,用户j利用该时隙对的后一个时隙发出申请应答信息;如果接收的信息和发送的信息不一致,表明有另外一个用户正在竞争该时隙,则随机延迟Δ(Δ的范围取决于总的用户数)个数据帧的时间后再进行接入申请。
用户退出:如果用户k或j要退出该系统,需要利用其占用的时隙发出断开申请,对应的用户发出断开应答后,双方同时释放占用的时隙对。
系统同步:为了保证整个系统的时钟同步,避免不同用户时隙的相互重叠,可采取两种措施:
(1)时隙间留有3.4ms的保护间隔;
(2)除了加入系统的第一个用户,后续用户都要通过锁相环技术把自身的时钟调整成和第一个用户一致。所有的用户退出系统后,系统的时钟同步又要以第一个新接入的用户为基准而重新开始。
3.系统测试
紫外光收发模块如图4所示,板卡尺寸均小于5cm&TImes;5cm。为了加大紫外光的发射功率,在发射端还采用了LED阵列。基于上述模块构建的测试系统表明,收发双方在室内可以实现4.8Kb/s的清晰的语音通信。后续还将进行室外环境下的测试。

图4紫外光收发模块
三.结语
紫外光通信不易被探测和截收,可以通过散射进行非视线通信,非常适用于近距离抗干扰和有遮挡环境下的通信。本文设计了一个基于LED的紫外光通信系统,研究了光路设计、时钟恢复、信道编码等方面的内容,并重点设计了双工通信协议,初步开展了链路性能测试。该系统将可用于语音和数据的双向保密传输。
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)
- 适用于工业能源采集的技术 (08-10)
- 单片式电池充电器简化太阳能供电设计(08-20)