用EPLD实现单脉冲二次雷达的应答解码处理
二次雷达与一次雷达基本上是并行发展的。与一次雷达相比,二次雷达有回波强、无目标闪烁效应、询问波长与应答波长不等的特点,从而消除了地物杂波和气象杂波的干扰。单脉冲技术应用于二次雷达,可以方便地基于多个波束对目标测量,进而有效地增加数据冗余度,提高角度测量的精度。对应答处理而言,单脉冲技术的应用,大大提高了在混叠或交织情况下对应答码的解码能力,使单脉冲二次雷达与常规二次雷达相比实现了一次质的飞跃。
二次雷达与一次雷达的根本区别是工作方式不同。一次雷达依靠目标对雷达发射的电磁波的反射机理工作,它可以主动发现目标并对目标定位;二次雷达则是在地面站和目标应答机的合作下,采用问答模式工作。目前的航管二次雷达共有七种询问模式,分别称为1、2、3/A、B、C、D和S模式。根据询问脉冲P1与P3的间距决定(S模式除外)各种询问模式。
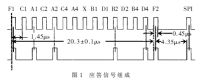
机载应答机发出的应答码由16个信息码位组成,这些码位的代号依次是 F1、C1、A1、C2、A2、C4、A4、X、B1、D1、B2、D2、B4、D4、F2 和SPI。每个码位都有两种状态,即有脉冲或无脉冲。有脉冲时为"1",无脉冲时为"0"。F1与F2的0.5电平处的脉冲前沿间隔为20.3±0.1μs,称为框架脉冲,它们是二次雷达应答信号的标志脉冲,均恒为"1"状态。X位是备用状态,恒为"0"。两个框架脉冲(F1与F2)之间的12个信息码位,可以编成4 096个独立的应答码。SPI是特殊定位识别码,当两架飞机相互接近或者应答码相同时,调度员可以要求其中的一架飞机在已回答的12个码位基础上再增加一个SPI脉冲,以便准确识别。二次雷达应答信号组成如图1所示。
2 应答处理器系统组成
单脉冲二次雷达应答信号处理的基本流程如图2所示。
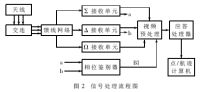
在视频预处理器中,和与差支路的∑、△视频信号,经A/D转换器进行数字化处理后,变成两组8位的数字信号传送给应答处理机;将∑接收单元与△接收单元的信号经相位鉴别器,生成表示目标在波束中心左侧或右侧的轴向指示信号BI(2位),送应答处理器;∑与Ω两视频幅度进行比较,产生表示应答为旁瓣应答还是主瓣应答的RSLS(1位);接收信号经6dB检测、反窄处理、二分层产生PSV(处理后的和视频,1位)。视频预处理器产生上述信号并输入给应答处理机,进行框架检测、和差比计算、码装配等处理,最终形成应答报告输出给点/航迹处理计算机。应答处理机系统的组成如图3。
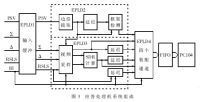
在应答处理机中选用了Lattice公司的EPLD作为主处理芯片(ispLSI1032E)。该芯片有64个I/O端,8个指定输入端,6 000个逻辑门,192个寄存器,最大时延≤12ns,通过简单的5线接口,即可用PC机对线路板上菊花链结构的最多8个芯片进行编程。PC104是嵌入式计算机,其CPU是一片兼容的64位第六代处理器,运行速度可达300MHz,其图形处理器可支持各种LCD及TFT显示屏,同时支持PS/2键盘、PS/2鼠标、两串行接口、一并行接口、USB接口、声卡功能。
应答处理机的工作原理:1位PSV、8位和视频、8位差视频、2位轴向指示及1位接收旁瓣抑制信号,在经过输入缓冲并与系统时钟信号同步后,其中的PSV信号进入边沿产生电路,所产生的前沿延迟一个框架时间(20.3μs)后与未延迟的前沿信号相与给出目标框架,启动4个解码器中处于空闲状态的装配器开始解码工作,产生解码需要的定时脉冲序列。同时和视频、差视频、轴向指示、旁瓣抑制信号送入视频采样电路,经过视频采样产生的SVA(和视频幅度)和DVA(差视频幅度)经和差比计算电路产生SDR值,SVA、DVA、SDR送数字寄存器进行延迟,延迟及未延迟的SVA、SDR、轴向指示、接收旁瓣抑制和目标前沿信号一起送入代码装配器,在定时脉冲的作用下,对目标应答信息进行解码、去除幻影应答、解旁瓣应答和军事告急应答。经过进一步相关、确认和修正后,将目标的SVA和SDR代码、综合的代码置信度信息及一些标志信息送代码装配总线,在输出控制的情况下依次写入先进先出(FIFO),PC机依次读出GPS时间信息及FIFO中的目标报告。
3 系统的具体实现
3.1 旁瓣抑制与边沿提取
近距离的飞机能够被天线的旁瓣探测到,但如果没有特殊的旁瓣抑制措施,就会使地面接收装置接收到来自旁瓣的应答信息,从而夸大飞机的数量。P2作为旁瓣抑制脉冲由Ω通道发射,在天线的主瓣波束内,P1与P3的幅度会高于P2,而在天线的旁瓣内,P2会高于P1与P3,机载应答机根据P1、P3与P2的幅度关系决定是否做出应答,对旁瓣内的询问不予应答。
单脉冲二次雷达的PSV信号是由接收机和通道(∑)内的应答信号,经过特定门限电平进
- 航管二次雷达射频切换单元FPGA实现(03-01)