深度解读美国服务机器人技术路线图
必须使多个流动结构,比如腿、跟踪设备和轮子,在全新的、非结构化的动态环境中执行高速的没有冲突的移动操作。
·15年:包括多个运动机构如腿、轨道和车轮的服务机器人,在新的非结构化的动态环境中执行高速、无碰撞的移动操作。它们对自身环境进行适当的翻译,可能是对执行特殊任务的环境、整体或局部,以及长期的环境所做的呈现(语义地图)。使用它们不断规划以实现全局目标。它们能够对动态变化做出强有力的反应(例如,由于被推或被挤的意外扰动)。通过任务导向,它们能够交互探索,通过与环境的相互作用,它们能够通过智能的方式对任务进行修正,以确保和促进其任务完成。其中包括机器人间的、接触目标间以及环境的静态部分间相互作用的物理属性(滑动、推、扔等)的推理。
● 真实世界规划与导航
2009年以来,服务机器人真实世界规划与导航领域,已在主要途径上有了发展。这些发展仍然在美国机器人路线图报告中。当时的关注重点是在高度非结构化情况下,利用有限的经验知识,对空间和障碍物导航。机器人需要获得和感知数据,以建立将要规划的环境模型。在执行这些规划时,额外的传感信息将被用于反馈,甚至用于小数量机器人在实验室环境下进行非实时规划和控制。

自主移动服务机器人在后勤和医疗应用中的部署举例——上起: SymbioTIc, Aethon,和Kiva系统
在高度非结构化环境中,在有挑战性的问题上已经有了进展。自从2009 年以来,最显著的变化就发生在能够实时规划和控制的大型车队的服务机器人应用领域。那里的环境和任务更加结构化,其应用领域包括物流和材料处理、医疗卫生和农业等(图2),这些应用不仅在技术发展上很重要,同时服务机器人在解决真实世界问题上更具有价值。有效的社交人际交互与其接口的核心能力研究,必须遵循以人为本的设计进程,并对利益相关者进行严格评估。在这一进程中的用户调查,可能会包括早期设计过程中具有针对性的健康人群,也会包括由此形成的设计迭代评估,并且延伸到病人、医生、家庭、治疗师以及其他一些社会成员。在该领域中,研究和发展的关键性方法,是找到合适的措施方法以成功地实现自然交流,使环境与健康应用的联系真实有效,并研发出对输入到机器人系统中的实时量测信息进行在线评估和学习的方法。
下面的数据有助于了解当前的技术在操作独立安装时,车队的数目在10^3和10^4之间。
·实时导航和任务规划的速度,在每小时10^4到10^5个任务或交易之间。
·包括在2D和2.5D中,由地图定义的网络技术中的障碍和蔽障导航,如仓库和医院的走廊。2.5D来源于在多个楼层或不同级别的规划和控制任务之间的协调。
·协调多个机器人的任务,来完成其同步。
·任务,包括感知和操作目标来完成先验知识的任务。当机器人到达当地场景时,通过传感信息进行任务描述增强。
·重新规划动态解决问题的能力,如任务失败、障碍或避免碰撞,包括有人存在的相同操作环境。
·高水平的机器人规划和控制集成,如物流供应链或医院信息系统。
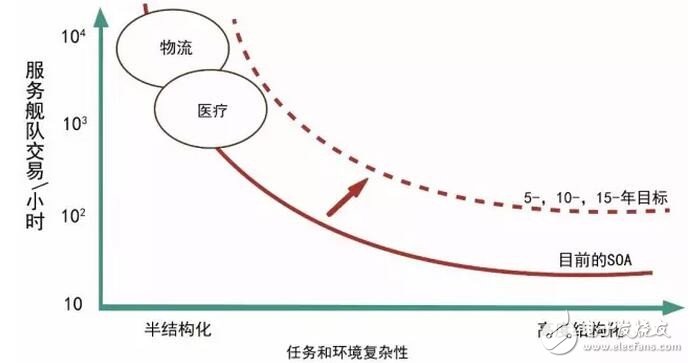
图3为在操作环境和任务中对于实时性能指标和程度结构的描述,目前的路线图设想推动右上的极限,在不确定和复杂操作中提高能力。
以下是产生这种积极效果的方案:
·随机规划——针对不确定模型,考虑一个确定的计划和控制问题。一个使用已提出的规划和控制策略系统的仿真,只有在仿真代表了真实世界的前提下才有效。真实世界的现场实验,将揭示仿真的需要,以更好地模拟真实世界。如以统计的参数数据代替常数,增加新的动态组件或失效模式的模型,从而通过仿真寻找策略鲁棒性的极限。在未来五年,为了使用最初的不确定特征发展规划和控制,研究的挑战可能来自直接方法研究。一个现实中真正强大的策划者,将能够利用统计知识的优势对环境建立条件规划。预见性的规划都将增加任务的安全性和效率,机器人将能够根据内置的不确定性进行操作。
·当前模型自动检测的有效性——在未来5~10年,机器人有望工作更长时间。在高度动态环境下,统计模型规划的时间,可能不能正确地表征随时间变化的环境。通过鲁棒的方法,在飞行器上的检测仍然使用的是模型,而不是控制回路中不可分割的部分。未来5~10年的目标是,机器人在执行计划中提高其整合由传感器获取数据的能力,以更新的基础静态统计模型为基础,自主决定何时以及如何进行规划。我们的发展目标是,构建能够生成和更新的系统,能够长时间不
- 机器人要走入智能家居还需突破什么?(10-14)
- 智能机器人四大分类详细说明(09-20)
- 基于STM32的家庭服务机器人系统设计(02-13)
- 基于DSP和机器人的声控系统设计与实现(02-21)
- 虚拟现实系统都有哪些核心技术?(08-06)
- 体验上汽推出的iVoka语音交互技术(06-19)