对比几种车用LED驱动方案,谁更优势
因为LED灯具有很高的应用灵活性,所以在进行汽车设计时,设计人员可利用LED高可塑性将车辆的灯光作为该汽车品牌外观亮点。而且LED灯发光效率高,使用寿命长,这也从技术角度解释了为什么这种光源越来越受到汽车厂家的青睐。汽车上都有很多种类的灯由LED光源扛起了大梁,包括方向灯、尾灯、近光灯和刹车灯,这些LED灯担任的角色不同,功能不同,对为其驱动的电源也提出了不同的要求,并且驱动电路的拓扑结构必须尽可能地完全满足LED灯对驱动电源的要求。此外,LED灯的性能也在不断地发展。一方面,驱动电流仅为10mA级LED灯产生的亮度能持续增强,另一方面,单个LED需要的电流已经达到了数安培,这都给LED的控制提出了不同的要求。现在没有,也不可能存在一种通用的拓扑结构能满足所有LED光源的要求,而且可以兼顾低成本和高效率。这就不难理解,IC设计人员在选择和协调驱动方案时,涉及的可能使用的驱动方案越多,他们就越要关注各个方案的特点与应用要求的匹配情况。
基础数据
从技术上说,设计用于控制车辆照明LED的控制电路考虑到很多方面。这种电路的设计从几个不同的方向都取得了进展:一方面,驱动电流在50毫安以下的LED灯的亮度能在不断增强,另一方面,驱动电流达到数安培的单个LED获得了长足的发展。在本文中,我们将比较七个可能用于控制车辆照明LED的拓扑结构,并解释它们的性能和各自应用领域。IC设计人员可以在对各种拓扑结构介绍的基础上,根据应用要求的特点,在多种拓扑结构中选择成本与工艺要求相匹配的那一种。但是,这些拓扑结构中并不存在一种低成本同时又高效率的,适用于所有应用领域的通用拓扑结构。
只有在得到良好的散热,并且驱动电流稳定的前提条件下,LED灯才能正常运行并达到它的最大使用寿命。在近几年来,随着OLED(有机发光二极管)技术已经进入到这个领域,LED灯对上述基本使用条件的要求更为苛刻了,这是因为,相对于较早出现的,以LED技术制造的LED灯,以OLED技术制造的LED灯对高电流密度更为敏感。此外, OLED驱动方式中所采用的亮度调节方式为模拟驱动方法,即,通过模拟控制电路,而不是通过数字脉冲宽度调制技术(PWM)改变灯的发光强度。
如远光灯和近光灯,这种发光时功率较高的LED灯需要几乎强制性的时钟控制功率系统。以电子方式控制的,高效的开关转换器可以减少LED灯工作过程中出现的功率损耗。相对于传统的白炽灯,LED灯和电子器件对高温工作环境更为敏感,所以,在设计转换器工作环境时,为确保转换器高效运行,需要将转换器安装在足够大的空间内,也就是说,从冷却技术方面考虑,足够大的安装空间确保转换器能够稳定工作。
限制和要求
在设计车辆照明电路过程中,设计人员遇到的最典型的挑战是,要为不同种类的LED灯提供相当宽的驱动电压范围,并且不同LED灯要求的输入电压和输入电流之组合各不相同。通常情况下,向LED模块驱动的电压下限在4V左右,而向LED模块驱动的电压的范围会受到汽车启停系统(Start-Stop-System)的影响;位于极性保护电路后的电子器件的驱动电压下限往往只有3V。因为LED灯输出功率被设置为恒定,这就导致当其驱动电压较低时,输入电流持续升高。
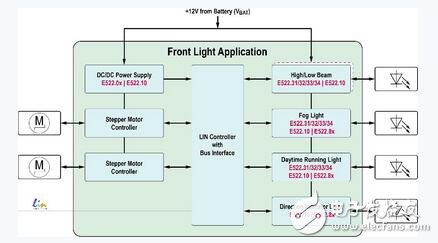
前灯典型应用
DC/DC电源管理
步进电机控制器
远光灯/近光灯
雾灯
日间行车灯
方向灯
带总线接口的LIN控制器
elmos Semiconductor公司推出的 E522.xx系列控制器可满足针对车辆前部照明所需的各种LED灯,并符合解决方案设定的限定条件和要求。
为了抵消这种电流升高的效应,在LED灯控制电路的设计任务书中往往要求设计出一种合适的降低输入电流额定值的电路装置(例如,一种可以设在灯具中,在灯的驱动电压较低时,能够实现线性降低灯输入电流额定值的电路装置)。模拟连续驱动电路装置可以实现连续向LED供电,避免出现照明中断的情况。上述措施不仅仅在技术上解决了问题,而且在设计极性保护电路的最大电流时以及EMC(电磁兼容性)滤波元件的最大电流时,使用上述措施也有利于降低解决方案的成本。
一般来说,如果串联连接的LED工作电压大于等于2V,乃至所需的电压达到55V以上时,以集成电路(IC)驱动方案对其进行驱动是无法产生足够的驱动电流的。此外,对上述串联LED进行驱动,电路中的电流可以被调整而实现的电流范围应该满足以下条件,即,经模拟调整实现的最大电流与经模拟调整实现的最小电流之间的比应大于10:1。一般情况下,经调整后电流的极值为1.5A,在试验研究中,模拟输出的电流的极值已
车用LED驱动 相关文章:
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)
- 适用于工业能源采集的技术 (08-10)
- 单片式电池充电器简化太阳能供电设计(08-20)