一种普适机器人系统同时定位、标定与建图方法
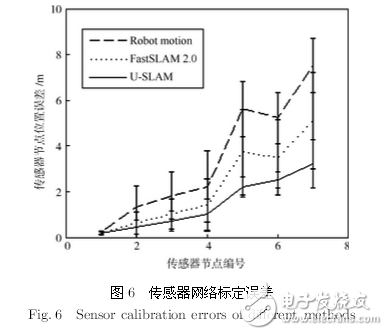
U-SLAM中联合机器人位姿与环境特征这三类传感器网络标定方法进行对比,三类方法各运行50次,得到的传感器网络标定误差的数学期望和方差如图6所示。可以看出,仅依据运动方程的方法,机器人位姿估计误差随运动距离迅速增加,得到的标定结果误差很大,难以满足要求;依据FastSLAM2.0算法能够有效减少机器人位姿估计误差,从而提高了节点标定的精度,但由于仅考虑了节点对机器人的观测,产生的标定误差仍然较高。而本文U-SLAM中,传感器网络各节点标定、机器人位姿估计相对独立,解除了观测与机器人运动之间的数据耦合,在明显提高机器人位姿估计精度的同时,传感器节点标定的精度和稳定性也得到了大幅改善。
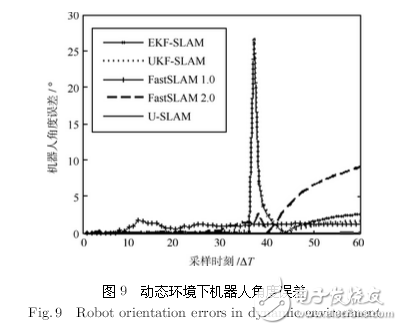
中融合了机器人的观测信息,但机器人感知范围有限而未察觉目标变动,仍以先前获取Lm的位置和当前观测来推算当前位姿,从而导致定位错误。对于FastSLAM1.0算法,机器人定位只根据自身控制信息完成,未融合观测信息从而避免受动态环境的影响。而本文U-SLAM中,通过传感器网络监测动态环境特征的变化,并将其告知移动机器人,避免了动态路标对机器人定位的影响,并获得了比FastSLAM1.0更高的定位精度。
上述实验均在WindowsXP系统下进行,计算主机的CPU采用Pentium42.4GHz,内存为1G.在该配置下运行EKF-SLAM的平均耗时为12.3s,UKF-SLAM的平均耗时为15.4s,FastSLAM1.0平均耗时为80.7s,FastSLAM2.0的平均耗时为135.4s.本文U-SLAM方法运行的平均耗时为280.8s,虽然实时性较差,但仍能满足实际系统的需要,并且重要的是,能够在定位和建图过程中在线完成传感器网络标定。实验中没有进行本文方法与传统先离线标定后在线定位建图的对比,主要原因是定位和建图的精度很大程度上取决于标定的精度,而在传统方法中离线标定的精度本身随标定方法和策略差异很大。
4结论
本文针对普适机器人系统提供服务的基础工作,即机器人定位、传感器网络标定和环境建图三个互相耦合的关键问题展开研究,提出了普适机器人系统同时定位、标定与建图的概念,给出了同时机器人定位、传感器网络标定与环境建图问题的联合条件概率表示,基于贝叶斯公式和马尔科夫特性将其分解为若干可解项,并由Rao-Blackwellized粒子滤波迭代求解,设计了位姿粒子的采样提议分布和权值更新公式,并给出了机器人定位、传感器网络标定和环境建图的递推公式。
作为人们日常生活和工作的重要场所,机器人的服务环境往往较为复杂,其中目标往往具有不同程度的动态性。在这种动态服务环境下普适机器人系统具有独特的优势,将会发挥更显著的作用。在完成传感器网络标定和环境地图的初步构建之后,如何通过机器人和传感器网络的交互共同维护随环境动态更新的特征地图是下一步的研究内容.
- 放电少、放置10年依然可用的锂亚硫酰氯电池(07-31)
- 面向国防应用的安全和可靠无线传感器网络(11-06)
- 无线传感器可放置在任何地方,以在长距离提供低功耗和可靠的无线传感器网络(12-08)
- 可靠、低功耗无线传感器网络适用于物联网: 使无线传感器像网络服务器一样易于使用(05-06)
- Q&A:能量采集知多少 凌力尔特技术讲堂(二)(05-05)
- 为工业物联网正确选择无线网格网络协议以实现新应用(04-03)