车载转换器与马达控制MCU应用指南
触到转子数据,而且必须始终从外部轴角数字转换器中获得(如图3所示)。这样不仅相对较慢,而且可能引发错误,而这些错误可能会对整个系统的功能安全产生负面影响。
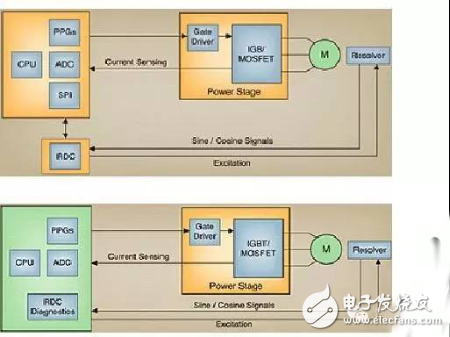
图3:配备外部整合轴角数字转换器的马达控制。
拥有了最新的MB91580 32位微控制器系列后,富士通半导体在这方面独树一帜。在一个144讯框中,32位微控制器拥有150DMIPS的运算能力、可达1MB的闪存和128KB随机内存,以及多个I/O端口和定时器结构,能够产生所有马达控制信号和充足的通讯接口,如CAN、LIN和Flex Ray(见图4)。轴角数字转换器的整合形成了极简的系统架构。每100纳秒可从专用缓存器中读出旋转器位置、正余弦值和角速度 ,并随时到达MCU。
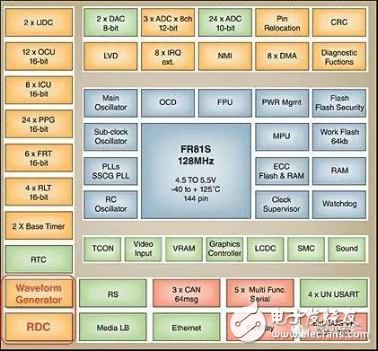
图4:片上可用资源示意图
开发马达控制器常常用到一种基于模型的方法:强大的新软件工具一般与浮点数一起运作。为了将以这种方式开发的算法转移到传统的微控制器,浮点数必须转化为整数。MB91580中的整合浮点单位增强了运算能力,减少了从模型转换到应用本身的工作量。
分解器诊断增加了功能安全
MCU比较容易识别马达故障。例如,相电流可能没有对应的预期值,或可能无法达到预期速度。在这些情况下,MCU可以设置特定的系统状态而不影响车辆的安全性。
但是,如何监测分解器和诊断故障呢?MB91580可透过合成诊断和像接地短路这样的故障表现,来监测分解器发出或传入的所有信号,这样便可以快速准确地发现缆线的破损和中断,甚至是分解器绕组内的短路情况。一旦这种故障产生,MCU可以立即收到内部中断信号,因而迅速做出反应,并有针对性地处理具体情况。所有这些都是在内部运作,将延迟时间最短化,这与带外部轴角数字转换器的系统不同,在这类系统中故障信号必须透过一个连接到MCU的缓慢接口进行传输。
由于MB91580系列专为机动车应用设计,它会提供其他一些功能来增强执行的安全性。例如,透过ECC(纠错码)来监测所有的闪存和随机内存。内存保护单元可识别和防止对受限内存区域未经授权的存取。整合CRC(循环冗余校验)发电器(CRC16&CRC32)和内部总线上的奇偶校验位可增强安全性。
混合动力汽车和电动汽车中的应用
适合整合马达控制MCU的应用包括用于电力驱动马达的转换器。转换器结构图显示如图5。
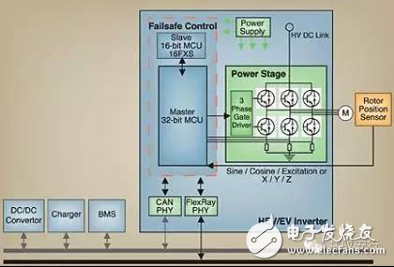
图5:转换器结构图。
出于功能安全的诸多因素,马达控制MCU(主控)是由一个二级小型微控制器(从属)支持。两个微控制器一直保持联络,一旦发现不正常的情况,从属MCU可以启动系统重置或切断马达电源。主控MCU产生马达通讯信号,测量和监控相电流,发出旋变信号,并透过正弦/余弦反馈信息来确定旋转器的位置和角速度。马达控制运算使用所有用于转子转速和扭矩的相关数据。
转换器透过内部网络(CAN或Flex Ray)与电池管理系统通讯,以确保提供所需的能源。
节能对混合动力汽车和电动汽车至关重要,任何需要持续能源供应的系统,例如液压助力转向系统,都会长期将过度压力施加于储能系统。液压系统持续执行以透过伺服泵设立所需的压力。
纯电动助力转向(EPS)系统只有在使用中才需要能源。原则上,该设计与动力总成转换器的设计相似。有主控和从属MCU,而电源组件主要是在稳压方面有所不同(如图6所示)。永磁同步电动机也用于该应用,而分解器如之前描述的那样执行。
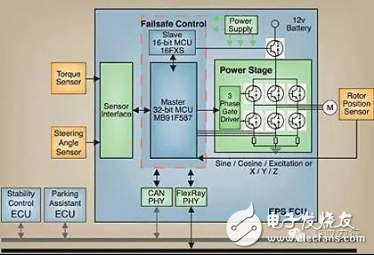
图6:主-从MCU设计图。
然而,主控MCU仍须评估转向输入设备(倾角传感器)和扭矩传感器,以随时提供正确的转向辅助。EPS控制需要诸如执行速度这样的数据,它透过内部网络来提供(例如CAN总线)。这些信息有利于运算所需的额外转向扭矩,以及将其传送到转向柱上的马达。
这样做的目的是为了大幅地减少驱动器负责的负载,并提供转向运动的动态支持。例如,相较在高速公路上高速行驶的情况,当车辆几乎处于停滞状态时,转向运动则需要更多的支持。EPS是为了增加驱动器的舒适性和安全性。对于电子稳定控制装置而言,完全可以透过转向干预来主动调节车辆的稳定性。可以设想,EPS成为驱动辅助系统的一部份,使得无需驱动输入便可自动停车。
市场上的混合动力汽车越来越多,其中不少都配有简单的启停系统,预计在未来几年中,全混合动力汽车和插电式混合动力汽车(PHEV)的数量会大幅增加。无内燃机的全电动汽车需要安全、经济、高容量的储能系统。技术开发也一直在向前推进,尽管其速度不如许多人所希望的那样。等发展到一定程度时,混合动力汽车会大幅地使用以燃油和电力为形式的能源。
高效的软件运算、强大的微控制器和高效
- 最新知名厂商电机控制解决方案集锦(07-15)
- 大联大旗下友尚集团推出多个马达控制方案(06-30)
- 大联大旗下凯悌集团推出马达控制解决方案(06-24)
- 如何使创新的MCU实现高效节能电机控制?(07-07)
- 基于SoC FPGA的工业和马达控制方案设计(02-25)
- 马达控制小Tips(1):如何实现步进电机的基本控制?(07-19)