盘点服务机器人行业的九大关键技术!
光导航技术是基于激光的一个slam导航技术,这个在机器人应用里面比较广泛,但是应用最多的一个方面是扫地机器人。
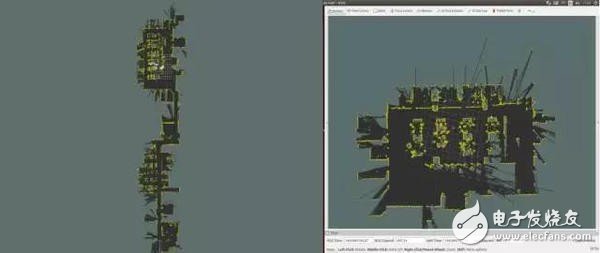
大家了解,很多扫地机器人公司,包括国内的科沃斯,它卖的90%(甚至95%)的产品都是不具备导航技术的。简单来讲就是说,到底去哪里扫,扫哪里,机器人都是不知道的,基本上就是盲扫;进了房间之后需要人为给它规划一个路线,它就按照那个路径扫,但具体哪里没有扫,或者扫了哪里,机器人都不知道。
但是目前在国内深圳有家叫inxni的公司,它推出的一个新的产品"以内X533",inxni以内扫地机器人的价格大概是2799,这款机器人就用了激光导航的技术——当然科沃斯也有,而且应用得非常好。这个机器人到房间以后,它会迅速完成一个房间的地图扫描,迅速地构建一个地图。构建好地图以后,它在扫地的时候,首先它知道自己的位置,它在哪里,另外它是完全按照扫描出来的地图逐行清扫,不断清扫。

虽然这种机器人还是有两个问题——它虽然知道自己的地图、知道自己的位置,但它不知道哪里干净还是不干净的;第二,它也不管干净不干净都会去扫,干净的也扫了,不干净的也扫了。但是这种效率已经比传统的盲扫机器人效率提高很多了,这就是激光导航技术。
stargazer导航技术
stargazer导航技术跟激光导航不一样:
第一,激光导航只要装一个激光扫描的传感器,出来以后扫描一圈,就构建一个地图。但stargazer有个特点,就是要在天花板上布置一些红外的感应器,布置完红外感应器就可以定位机器人位置;
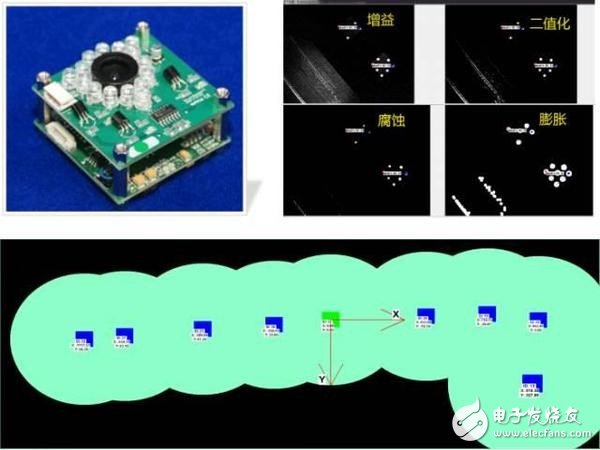
第二,激光导航相对来说比较适用于室内的场景、家庭场景,面积不是很大的。在大型的场馆,比如会展中心,它的空间非常大环境比较复杂,如果用激光扫描,扫描实施的难度比较高,另外运算的时间周期也比较长。但stargazer技术可以适用这种大型场馆,比如在大型场馆里面用的迎宾机器人、一些服务机器人,用的就是这种stargazer导航技术。
我们公司现在自己也在研究stargazer导航技术的算法,我们也把这些算法写到一些嵌入式的平台里面,应用在一些服务机器人身上。
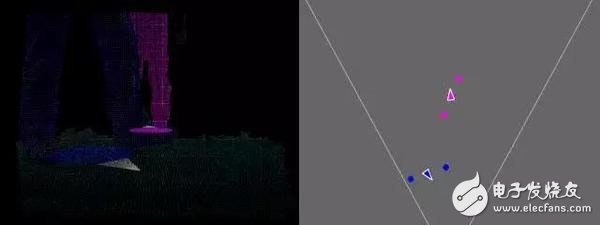
视觉导航技术
除了激光以外,视觉导航我们也比较常用。
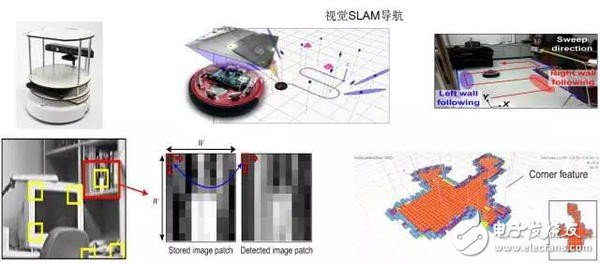
但视觉导航目前有一个问题,就是在真正商用的时候,比如放在一些商业化产品上,它的成本比较高。因为视觉导航是图像,对运算的能力要求比较高;因为运算能力要求高,相应的芯片就比较贵;芯片贵了,放到商品化的东西,它相应的就会提高商品的单价。所以目前真正用视觉导航技术的机器人产品还比较少,特别是扫地机器人就更少了,基本上扫地机器人都不会去采用视觉导航的方案。
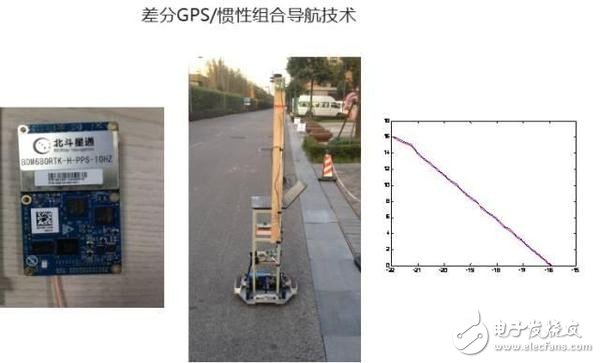
室外导航技术-差分GPS/惯性组合导航技术
刚才讲的激光、stargazer、视觉,基本上都是室内导航技术,那还有一个是室外导航技术。室外导航技术基本上目前都采用GPS的方式来实现,这个技术相对比较成熟,大家听的也比较多。
机器人跟随技术
还有一个很关键的就是机器人跟随技术。很多小的机器人也有跟随技术,这个有什么意义呢?
比如说现在我们做一个家庭陪伴型机器人,或者是现在市面上已有的很多陪伴机器人,它会走,走来走去。但它走的方式是——你手机掏出来,蓝牙连上后用手机控制它走,向前向后,它不是自主行走的。
如果真正做得好的话,我们会希望这个机器人是我的一个家庭成员,是我的一个朋友,是我家庭的一份子。我希望我走到屋里的时候,它也跟我走到屋里,我到客厅,它也跟我走到客厅。它会跟着人的步伐一起走,这个就是机器人的跟随技术。
机器人多机调度技术
多机调度技术会应用在哪里呢?当我们在一些大型的场馆里,有些时候可能不仅仅需要一个机器人,可能是多号机器人在协同工作,这个时候就需要用到机器人调度技术。需要有一个后台,需要有一个平台,需要这些机器人一同协同工作。
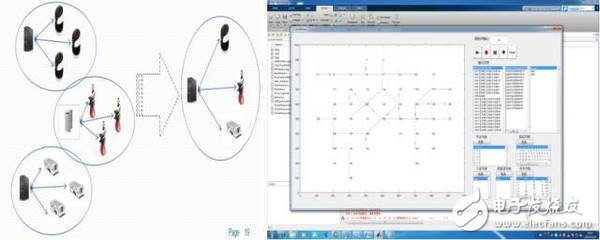
现在深圳有些餐厅已经开始应用餐饮机器人,送菜的、端盘子的,有用导轨的,也有不用导轨的。在一个餐厅,多台机器人在一起应用的时候,就会需要用到这个多机调度技术。
视觉识别技术

(例如机器人在演示摘西红柿、夹东西)
机器人底盘技术
有些机器人也不一定需要移动,但如果是需要移动的机器人就会用到底盘。那底盘到底是用履带式的,还是轮子的,还是双足的呢?
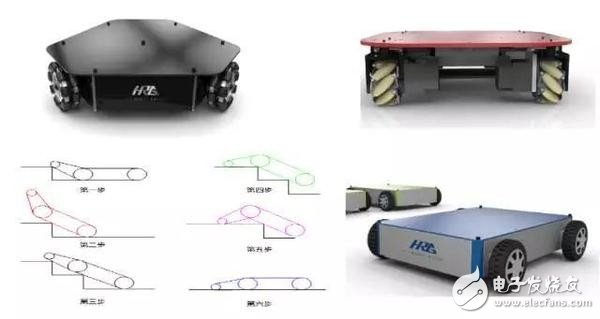
目前从实用性来讲,履带的、轮式的机器人会更满足目前的商用需求。因为双足最大的问题就是不稳,比如像小的、优必选的这种人形机器人,你一推它肯定倒。虽然它可能会爬起来,但是它一定
- 解密英伟达Tesla P100、GP100、DRIVE PX2平台(04-26)
- 人工智能处理器三强Intel/NVIDIA/AMD谁称霸?(07-23)
- 2016年人工智能与深度学习领域的十大收购(07-26)
- 人工智能实现的流派 FPGA vs. ASIC看好谁?(08-27)
- IBM沃森能否在人工智能领域突破重围?(09-19)
- 英特尔与高通将在汽车芯片市场再次对决(上)(10-03)