如何设计无人机飞行
旋翼机和旋翼飞行器一般不当做同一个概念。旋翼机如果从中文字词的组成来看和旋翼飞行器的区别应该是在名词的后面:一个是"机",另一个是"飞行器",然而更多的区别却是在前面"旋翼"两个字当中。

"旋翼飞行器"(Rotorcraft)包含的机型种类非常多,一般将结构上带旋翼的飞行器都纳入这一范畴如:直升机,旋翼机,倾转旋翼机,复合直升机,ABC(Advancing Blade Concept)旋翼式等等。
如上图X-50A蜻蜓旋翼/机翼转换式旋翼飞行器,可以从直升机模式完全转换为固定翼模式,该飞机飞行速度接近亚音速。

而"旋翼机"在国内一般特指"自转旋翼飞行器"(Autogyro)。后文如无特别说明,两者代表同一概念,也就是本文主要涉及的飞行器类型,本文不会涉及到其它种类旋翼飞行器。


这种"概念混乱"经常会给研究人员和行业从业者带来很多麻烦,如大家聊了半天飞行器,用的名词都差不多,最后却发现说的不是一码事。
一般爱好者甚至从业者最容易陷入的误区是将旋翼机与直升机混同起来。从外型来看两者确实非常相像,比如上面两幅图中就是不同机型。

很多媒体在报道相关事件时也经常会用错名词。比如上面这一幅图是去年在众多主流网路媒体中可以看到的标题为"美国邮递员驾直升机闯入华盛顿国会山降落"的新闻中使用的插图。该飞行器明显属于旋翼机而非直升机。事实上直升机的驾驶环境与操作难度都是大大残酷于旋翼机的。
MR.城堡会从两者对比中进行旋翼机飞行与操作的原理解释。
结构原理

直升机型飞行器结构的最明显特征是主旋翼和尾桨(或尾部涵道)。尾桨非常直接地提供飞行器偏航姿态变换力矩。

主旋翼机械结构比较复杂,一般会称之为"主旋翼系统"。虽然这两年开始扔掉副翼,扔掉Bell-Hiller转而采用电子增稳,但依然包括变距控制输入(周期变距,总距控制),Swash Plate结构以及基本传动装置等。
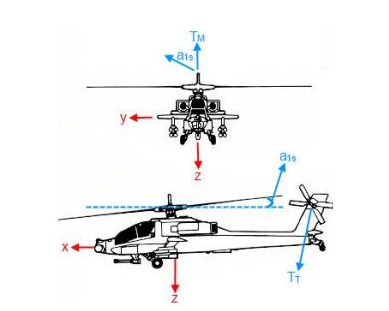
直升机主旋翼完全提供飞行器所需升力,并通过TPP(Tip-Path-Plane)控制来提供俯仰、横滚两个方向上的姿态力矩,因此主旋翼桨尖速度快,负荷大。

从上图看旋翼机结构主要包括
1、自转旋翼
2、推进装置(如螺旋桨Push/Pull、喷气推力)
3、尾部方向舵(Rudder)。
与直升机主旋翼不同,旋翼机的推进装置提供前飞动力,自转旋翼在飞行过程中不与动力部分连接(有些旋翼机采用旋翼预转技术),而是通过相对来流自动旋转。自转旋翼后倾提供升力。通过Rudder来控制偏航姿态。
优势与劣势
优势

1、从乘坐舒适性而言,直升机存在许多旋转部件,尤其旋翼转速、负荷都很大,造成机身的颠簸,机舱内噪声很大。而旋翼机在平飞中则更加平稳,噪音也小。

2、旋翼机自转旋翼桨尖速度较小,因此不容易出现前行桨叶激波失速,前飞速度可以有很大提高,而且无需平衡反扭矩的尾桨。
如上图为美国Carter公司在NASA项目合同中研发的旋翼机高速型:Cartercopter。最大平飞速度达到640km/h(海平面)和960km/h(h=13500m)。

3、旋翼机没有复杂的主旋翼铰接结构,自转旋翼结构简单,整机结构也非常简单,操控方式直接因此容易操作、容易制作。这也正是旋翼机常见于民间的重要原因。
劣势
旋翼机的优势确实非常明显,但正如世间的一切,完美仅仅属于上帝,除此之外皆存瑕疵。
1、定点悬停能力
旋翼机不具备定点悬停能力。原因很简单,直升机具备定点悬停是因为主旋翼提供的升力在垂直方向上完全等于整机重力。而旋翼机的自转旋翼无法提供等同于整机重力的升力,并且需要借助推动装置提供前飞速度以便获得更多来流。因此一切垂直悬停的场合与其无缘。
2、VTOL能力

相比于直升机和多旋翼机型明显清晰的定点起降能力,旋翼机并不具备优势。
大家可能注意到了,旋翼机底部往往是要有些轮子(如果在海上起飞则是气垫)的。
旋翼机一般采用旋翼预转技术,起飞前通过简单传动装置将旋翼预先驱转,然后通过离合器切断传动链路后起飞。由于旋翼本身不承担整个机身负载,因此它并不具备定点垂直起降能力。
旋翼机一般采用鹞跃式或超短距起飞。而在其降落时,通过操纵旋翼锥体后倾,需要一块比旋翼直径大一些的地方才可实现点式着陆而非垂直降落,但好在并不需要专用机场。
3、机动性
和直升机相比,旋翼机的机动性还是比较弱的。

直升机的机动性来自于主旋翼升力在各个方向上分量的快速变化,简单来说就是既够力,又够快!而自转旋翼不与动力连接,无法提供快速机动所需要的旋翼力矩
- 无人机不“炸机” 一定要注意这4点(04-30)
- 农民伯伯乐开怀:无人机,机器人助阵大农场(02-23)
- 无人机高清影像实时压缩处理传输平台解决方案(03-22)
- 无人机应用于航空测绘的解决方案(03-22)
- 无人机竟能授粉?勤劳的小蜜蜂要哭了(03-28)
- 无人机配方向传感器可自行创建地图+规划路线(10-02)