在实现自主导航之前 移动机器人都有哪些避障方法?
知的,为了解决上述问题,人们引入了计算机和人工智能等领域的一些算法。同时得益于处理器计算能力的提高及传感器技术的发展,在移动机器人的平台上进行一些复杂算法的运算也变得轻松,由此产生了一系列智能避障方法,比较热门的有:遗传算法、神经网络算法、模糊算法等,下面分别加以介绍。
1、基于遗传算法的机器人避障算法
遗传算法(geneticalgorithm,简称GA)是计算数学中用于解决最佳化的搜索算法,是进化算法的一种。进化算法是借鉴了进化生物学中的遗传、突变、自然选择以及杂交等现象而发展起来的。遗传算法采用从自然进化中抽象出来的几个算子对参数编码的字符串进行遗传操作,包括复制或选择算子(ReproductionorSelect)、交叉算子(Crossover)、变异算子(Mutation)。
遗传算法的主要优点是:采用群体方式对目标函数空间进行多线索的并行搜索,不会陷入局部极小点;只需要可行解目标函数的值,而不需要其他信息,对目标函数的连续性、可微性没有要求,使用方便;解的选择和产生用概率方式,因此具有较强的适应能力和鲁棒性。

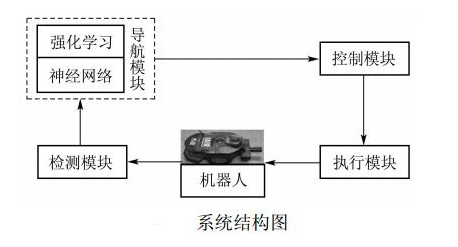
2、基于神经网络算法的机器人避障方法
神经网络(neuralnetwork,缩写NN),是一种模仿生物神经网络的结构和功能的数学模型或计算模型。神经网络由大量的人工神经元联结进行计算。大多数情况下人工神经网络能在外界信息的基础上改变内部结构,是一种自适应系统。人工神经网络通常通过一个基于数学统计学类型的学习方法优化,是一种非线性统计性数据建模工具,可以对输入和输出间复杂的关系进行建模。
传统的神经网络路径规划方法往往是建立一个关于机器人从初始位置到目标位置行走路径的神经网络模型,模型输入是传感器信息和机器人前一位置或者前一位置的运动方向,通过对模型训练输出机器人下一位置或者下一位置的运动方向。
可以建立基于动态神经网络的机器人避障算法,动态神经网络可以根据机器人环境状态的复杂程度自动地调整其结构,实时地实现机器人的状态与其避障动作之间的映射关系,能有效地减轻机器人的运算压力。还有研究通过使用神经网络避障的同时与混合智能系统(HIS)相连接,可以使移动机器人的认知决策避障能力和人相近。
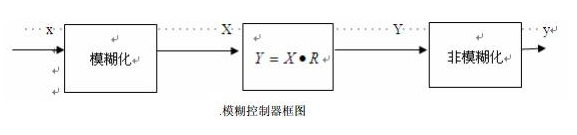
3、基于模糊控制的机器人避障算法
模糊控制(fuzzycontrol)是一类应用模糊集合理论的控制方法,它没有像经典控制理论那样把实际情况加以简化从而建立起数学模型,而是通过人的经验和决策进行相应的模糊逻辑推理,并且用具有模糊性的语言来描述整个时变的控制过程。
对于移动机器人避障用经典控制理论建立起的数学模型将会非常粗糙,而模糊控制则把经典控制中被简化的部分也综合起来加以考虑。
对于移动机器人避障的模糊控制而言,其关键问题就是要建立合适的模糊控制器,模糊控制器主要完成障碍物距离值的模糊化、避障模糊关系的运算、模糊决策以及避障决策结果的非模糊化处理(精确化)等重要过程,以此来智能地控制移动机器人的避障行为。利用模糊控制理论还可将专家知识或操作人员经验形成的语言规则直接转化为自动控制策略。通常使用模糊规则查询表,用语言知识模型来设计和修正控制算法。
除此之外还有启发式搜索算法、基于行为的路径规划算法、基于再激励学习的路径规划算法等避障算法,也都在移动机器人的避障研究中取得了很好的成果。
展望
随着计算机技术、传感器技术、人工智能的发展,移动机器的避障及自主导航技术已经取得了丰硕的研究成果,应用领域也在不断地扩大,应用复杂程度也越来越高。移动机器人的自主寻路要求已经从之前简单的功能实现提升到可靠性、通用性、高效率上来,因此对其相关技术提出了更高的要求。

然而至今没有任何一种方法能够在任意环境使机器人进行有效地避障,如何克服相关算法的局限性是今后工作的研究方向之一。可以看出不管是传统算法还是新兴的智能算法都有其适用与不适用的环境,通过传统算法与智能算法及智能算法之间的相互融合,克服单个算法的缺陷,增强整体的适用性,现在已经有很多这方面的研究,以后仍将是研究热点之一。
- 编码器在工业快速开门机中的应用(02-13)
- 反射式编码器技术实现便携医疗设备设计(07-10)
- 基于多标准视频编解码技术的PowerVR Series4处理内核(05-26)
- 光电编码器信号传输的光纤实现(10-12)
- 100米滚动码遥控发射机原理(03-11)
- 基于TM1300的嵌入式网络视频编码器的设计(05-01)