全面解析无人驾驶发展难点及现阶段技术手段
视频进行识别。这会导致系统无法对非标准的车型、物体、障碍物进行识别,从而无法进行预警。只有在识别成功完成后,才能根据大孝面积、尺寸、或其它特征进行距离的估算。
单目的优势在于成本较低,对计算资源的要求较低,系统结构相对简单。其缺点在于要保证较好的识别率,必须不断更新和维护好样本数据库;无法对非标准障碍物进行判断;距离并非真正意义上的测量,准确度较低。
3)双目摄像头
双目和单目有一个共同的特点,就是拍摄的图象是二维的,而雷达是单线或多线的。
双目的原理与人眼相似。人眼能够感知物体的远近,是由于两只眼睛对同一个物体呈现的图像存在差异,或称"视差"。目标距离越远,视差越小;反之,视差越大。视差的大小对应着目标物体的远近。这也是3D电影能够使人有立体层次感知的原因。所以说双目系统对目标物体距离感知是一种绝对的测量,而非估算。
双目系统的优势如下:一是成本比较低,但是比单目系统要高;二是没有识别率的限制,因为从原理上无需先进行识别再进行测算,而是对所有障碍物直接进行测量;三是精度比单目高,直接利用视差计算距离;四是无需维护样本数据库,因为对于双目没有样本的概念。
双目系统的缺点在于:计算量非常大,对计算单元的性能要求非常高,这使得产品化、小型化的难度较大。所以在芯片或FPGA上解决双目的计算问题难度比较大。
国际上使用双目的研究机构或厂商,绝大多数是使用服务器来进行图像处理与计算的;也有部分将算法进行简化后,使用FPGA进行处理,但双目配准的效果又收到较大程度影响,存在很多噪点与空洞,这对后续的计算不利,存在安全风险。
目前,中科慧眼技术团队实现了在芯片中对双目的高速计算,算法一方面要保证无噪点、空洞的干扰,另一方面要反映出细小障碍物的存在,在这个前提下将芯片计算效率提升至15fps。

上图为实际场景与计算得到的距离的对应关系(不同饱和度颜色代表不同距离,从暖色调至冷色调为距离由近及远)。从右图可以看出,距离计算的二维图像中,噪点与空洞被很好的抑制。色调(距离)的过渡是平滑过渡,没有跳变。
中科慧眼的双目方案和国际上其他方案对相同高速公路实测对比结果如下图所示:

双目摄像头的计算原理:
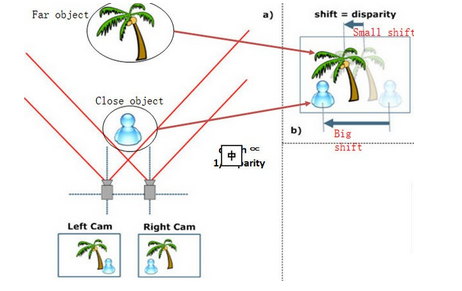
上图中的人和椰子树,人在前,椰子树在后,最下方是双目相机中的成像。可以看出右侧相机成像中人在树的左侧,左侧相机成像中人在树的右侧,这是因为双目的角度不一样。再通过对比两幅图像就可以知道树的视差小而人的视差大,因为树的距离远,人的距离近。这就是双目三角测距的原理。
离摄像头远的物体在双目图像中的disparity小,离摄像头远近的物体disparity大。如果距离无限远,双目几乎是没有差别的。所以国际上大多数双目系统的基线距离是十几厘米,和人眼的距离是相近的。双目系统可以实时把拍摄到的内容转化成距离。ADAS一个很重要的作用是碰撞预警。碰撞预警需要关注距离的变化,需要估计即将碰撞的时间。有了距离测量,才会有距离变化,有距离变化才会有碰撞时间的估计,最后才会有预警。
算法这里只讲概念,国际上有两种主流算法。一个叫ELAS,一个叫SGBM。这两个算法是公开的。
我们的双目方案相比传统的算法具有如下优势:
一是效率,在芯片上的效率达到15fps,在FPGA+ARM架构上的效率可以达到40fps。
二是效果,就是对于小障碍物的识别。既要做到没有杂点和空洞,又要表现细节。否则小的障碍物,比如一条横着的栏杆就无法识别,增加驾驶的风险。下面的图表现的是小物体和行人的探测上中科慧眼双目方案与国际上其他算法的对比。

(Our为中科慧眼算法效果、其它为国际流行传统方法的处理效果)
四、大规模产品化自动驾驶路还很长
国际上有Google,丰田等公司研制的无人驾驶汽车进行了大量的路测,在国际上具有较大的影响力。他们使用的是"全副武装"的雷达阵列+摄像头的模式,是一种侧重于技术积累、品牌传播、前瞻性研究的方式。计算核心使用的是位于车辆后备箱中的计算机阵列或服务器。仅仅车顶上方的velodyne多线激光雷达就高达数十万元。而这种方式去实现无人驾驶无论从成本、体积、便捷性等方面考量,都尚不具备大规模普及与推广的条件。国内也有很多十余家团队目前在做本地化的自动驾驶系统研发,像中科慧眼的双目产品样机已经完成,正在进行大规模路测。从产品理论技术原型走到真正被用户接受的产品,恐怕要有很长的路要走。
- 自动驾驶技术将在这7个方面改变我们的生活(09-10)
- 看日系三大品牌如何推进自动驾驶(02-28)
- 技术详解特斯拉Model S首起致命车祸 后续如何避免?(06-04)
- 【科普】到底什么是真正的自动驾驶汽车(07-15)
- 自动驾驶技术到底什么时候能成熟?(09-12)
- 汽车自动驾驶技术都有哪些?(09-20)