到底什么是汽车安全?
现在吃饭聊天儿,一谈到汽车的话题,年轻一点儿的"玩儿家"通常会说:"我这车,X秒破百,倍儿快!你没戏,追不上!得空儿咱找场地跑0-400 让你看看。"过日子人儿呢,会这样讲:"我的车可省油了,你看这么堵车百公里才X个油"。新买车的则是这样:"我这车带胎压监测、全方位雷达、自动启停等等等。..。.."关于汽车的话题其实很多,大多数人在购车之初除了考虑自己的购买能力外,更多考虑的则是车辆的外观、颜色、功能配置等等,在外观配置之外更重要的一点,忘记从安全方面考虑,这次我们就说说"汽车安全"这个话题。
初始安全
说到汽车安全,大致其实可以分为三项来讲,初始安全、主动安全与被动安全。初始安全不难理解,简单说就是车辆在设计之初即考虑降低诱发事故的因素而进行的初始设计。每一家造车企业在着手造一台车之前,都会从车型设计和车身整体布局等基础性能着手,尽可能地减少诱发碰撞的不安全因素。一台安全的汽车应该拥有足够良好开阔的视野,舒适并合身的座椅,简洁且可读性较强的仪表,仪表显示界面集中分布在视线中心范围之内,各种按键伸手可及等等这些看似不经意间的设计都为车辆的初始安全奠定了良好的基础。

IIHS 25%小重叠面碰撞测试,两台车的碰撞结果显而易见
主动安全
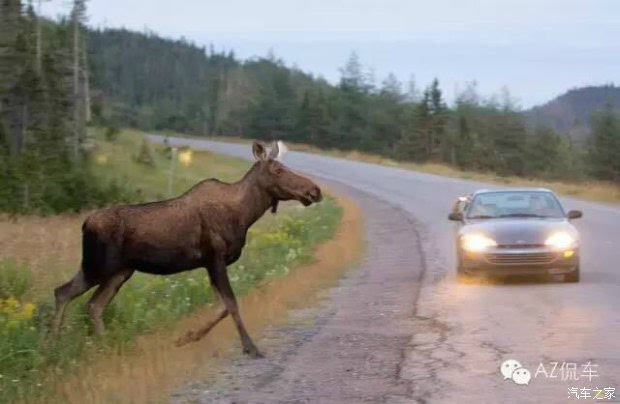
主动安全就更好理解了,通过操控车辆可以规避风险,这就是最基础的主动安全了,"麋鹿测试"测试的就是车辆的主动回避障碍的能力。车辆主动安全一定离不开车身稳定系统的辅助,各厂商的车身稳定系统在工作方面大致相同,只是在命名方面所有不同,像"ESP、VSC、VSA、VDC、ESC"等等。车身稳定系统的作用,是用来修正或抑制车辆在过弯时产生的转向不足或转向过度。转向不足俗称"推头"前驱车型在高速过弯时通常会发生这种状况,如果发生此类情况不要惊慌中踩死刹车,只要收一收油门,车辆的"控制权"又会从新回到你手中。转向过度俗称"甩尾",后驱车辆通常在过弯极限时会出现这种情况,比起推头,甩尾会来得比较有意思,在某种特定情况之下,甩尾出现时反打方向、补油,降挡如果动作完成足够漂亮,就会完成一次所谓的"漂移",但在民用后驱车型上通常在出厂转向设定上都会偏向于轻微"转向不足"以保证行驶的稳定性,毕竟上下班,买买菜不用来的这么激进。四驱车不会出现转向不足或转向过度?答案当然是不!即便是全时四驱车型,在民用车范畴中,转向不足或过度的情况也还是会出现的,但总要好过部分前驱或后驱车型。
主动安全除了主动规避风险外,制动系统也十分重要,在危急情况出现时,不论是干燥、湿滑或雪地都必须要刹得住车,并且还可以自由地操控方向,这就达成了一套可靠的制动系统,当然现在很多车辆还为此匹配的"刹车优先",如果在慌乱中同时踩住了刹车和油门,车辆不会窜出去,而是会默认刹车优先。

BOS:BrakeOverrideSystem,即刹车优先系统
除了主动规避风险和制动系统外,各大厂商也各自推出了高科技主动安全配置,预碰撞安全系统,像Volvo、Audi、BMW、Honda、Subaru等等很多厂家都有自己的一套预碰撞安全系统,有部分厂商已经把自己的这套高科技引入了国内市场。
预碰撞安全系统通常会检测道路前方的障碍物(行人、车辆或突然出现的物体),并采取主动制动或响起车内警报来提醒驾驶者注意,各个厂商在这套系统的设定上有所不同,有部分系统会在判定无法避免碰撞时第一时间缩紧安全带,并紧急制动来减小碰撞伤害。但有些厂商的这套系统就显得有些被动,当判定前方障碍物为静止时系统才会制动,由于不能检测行人或移动物体所以实际使用情况不尽如人意。IIHS在判定这一系统是否优秀时有着一套严格的标准,依照碰撞预防系统的效果,设立了Superior(优越)、Advanced(高级)和Basic(基本)3个不同等级的评价。只要车辆配备了符合标准的预碰撞安全系统,就可以获得1分,也就是获得Basic(基本)的评级,得分在2-4分的车型将归属于Advanced(高级)评价,5分与6分的得分则属于 Superior(优越)评级。
IIHS会在实际道路来进行评测,让车辆以时速12英里(时速19.3公里)和25英里(时速40.2公里)的速度驶向障碍物,共进行5次。根据最终碰撞预防系统的减速程度不同,IIHS将在主动刹车测试中最多给出5分,此外如果车辆还具备碰撞提醒功能,那么将额外获得1分,也就是说单一车型最高得分为6分。如果想知道您所关注的车型在评测中所获得的成绩请直接访IIHS官方网站进行查看 http://www.iihs.org/说了这么多车辆为此提供的主动安全设施,
- 自动驾驶技术将在这7个方面改变我们的生活(09-10)
- 看日系三大品牌如何推进自动驾驶(02-28)
- 技术详解特斯拉Model S首起致命车祸 后续如何避免?(06-04)
- 【科普】到底什么是真正的自动驾驶汽车(07-15)
- 自动驾驶技术到底什么时候能成熟?(09-12)
- 汽车自动驾驶技术都有哪些?(09-20)