嵌入式人脸识别门禁系统设计与实现
信息技术的迅猛发展给生活带来便利的同时,也给安全防范系统提出来越来越高的要求。传统的门锁、防盗门、监控报警系统等总是存在着携带不便、易遗失损坏、密码易被破解等问题。于是,运用生物特征识别技术的智能门禁系统就应运而生。其中,人脸识别作为生物特征识别技术中最为直观的一种识别方法,具有友好、隐蔽、简便、准确、经济及扩展性良好等其他识别技术不可比拟的优势。基于ARM技术的嵌入式系统以应用为中心,软硬件可裁剪,符合应用系统对功能、可靠性、成本、体积、功耗严格要求, 对节约成本、提高稳定性有极大地作用。
1 开发方案与设计
1.1总体结构设计
根据嵌入式技术与人脸识别技术的特点及其在门禁系统的应用构思,本系统确定了嵌入式人脸识别门禁系统的人脸识别子系统的设计及实现,进行图像采集、嵌入式处理和识别响应三部分来研究。首先,通过摄像头采集图像信息;其次,从CPU处理速度、技术指标以及软件支持工具等方面进行选型,采用三星公司的基于 ARM920T内核的S3C2440A芯片。开发方案中操作系统采用目前最新、最稳定的自由软件嵌入式Linux操作系统Ubuntu。前端的ARM板实现这两项功能。最后,将人脸图片传入后台数据库进行人脸识别,并反馈识别响应信息。人脸识别的核心部分,如从数据图片的检索、识别等均在后台完成。其开发方案的总体结构设计图如图1所示。
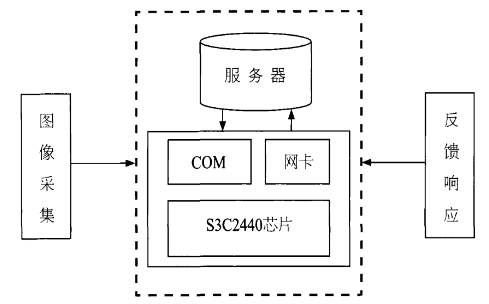
图1 方案总体设计结构图
1.2 内核及操作系统选择
S3C2440A采用ARM920T内核,集成如下片上功能:
1)1.2V内核,1.8V/2.5V/3.3V储存器,3.3V扩展I/O,16KB~令Cache(I—Cache)/16KB数据Cache (D—Cache)
2)外部储存控制器(SDRAM控制盒片选逻辑)
3)集成LCD专用DMA的LCD控制器(支持最大4K色STN和256K色TFT)
4) 4路拥有外部请求引脚的DMA控制器
5)IIC总线接口(多主支持)
6) IIS音频编解码器接口
7)AC、97编解码器接口
8)1.0版SD主接口,兼容2.11版MMC接口
9)2路USB主机控制/1路USB期间控制(ver1.1)
10)4路PWM定时器/1路内部定时器/看门狗定时器
11) 8路10位ADC和触摸屏接口
12)摄像头接口(支持最大4096x4096的输入,2048x2048缩放输入)作为一个基于GNU/Linux的平台,Ubuntu在Debian 基础之上, 旨在创建一个可以为桌面和服务器提供一个最新且一贯的Linux系统。它囊括了大量从Debian发行版精挑细选的软件包, 同时保留了Debian强大的软件包管理系统,以便简易的安装或彻底的删除程序。注重安全性和实用性。本系统采用版本号为Ubuntu 8.10。它具有虚拟化、完整的Java堆栈、增强的邮件服务器能力、改进的RAID支持、Uncomplicated Firewall防火墙更加简单、捆绑Landscape客户端等优势。
1.3软件流程设计
ARM内核和Ubuntu系统的选择为系统功能的实现提供了基础,系统软件则完成系统功能的控制。系统软件的设计流程如下,首先摄像头进行监控,如果门前有移动物体,进行拍照,并依据图像的亮度, 判断是否需要调节光线,图像处理后进行自动人脸检测识别, 如果不是没有找到匹配图像,程序返回到摄像头监控状态, 如果找到,开启楼门; 如果没有移动物体,继续监控。若是来访者, 则可以通过系统的其他方式,提出访问申请,如果房中有人则由房内人员控制打开大门;如果无人应答,系统提示房中无人, 同时采集来人照片,通过邮件自动发送功能, 向指定邮箱发送邮件,并记下来访记录。
2 人脸识别模块设计及实现
本系统最关键的实现技术就是通过进行人脸识别, 完成门禁控制。首先从静态图片或动态图像中找到人脸, 然后确定各特征点的位置并进行特征提取,最后将人脸与数据库中所有的人脸进行比对,并按照fisherface决策规则对该人脸进行判别分类。
根据输入图像的性质,人脸检测识别方法分为静止图像的静态方法和图像序列的跟踪帧方法两大类。根据嵌入式门禁系统硬件性能等自身特点对人脸识别技术的要求,采用了第一大类的方法,从图像序列中选择几帧质量较好的图像,然后用静止图像的人脸识别方法进行匹配。静态方法简单、快捷、性价比高。
2.1图像采集及预处理
通过USB接口的摄像头采集过数据后,采用最基本的图像增强手段对图像进行处理。图像增强就是用一系列手段对取得的图像灰度作修正,或者对噪声作过滤,使得图像灰度与实际景物的灰度尽可能地匹配。不能损坏图像的轮廓及边缘等重要信息,并使得图像更清晰,视觉效果更好。为了减少光线、角度等因素的影响,采用中值滤波
- 人脸识别在安防系统的应用(10-20)
- 科大讯飞李繁:多生物特征融合认证能极大降低误识率(07-17)
- 人脸识别技术在智慧城市中九大应用盘点(06-19)
- 揭秘IphoneX的3D深度摄像头(08-13)
- 视频监控系统与人脸识别技术的结合应用(02-17)
- 生物识别技术解析及解决方案集锦(09-24)