基于运动学原理的可穿戴下肢助力机器人
型,用此反应肌肉的功能。 随着对人体结构逐步深入的认识,不同的模型及分析方法被提出。
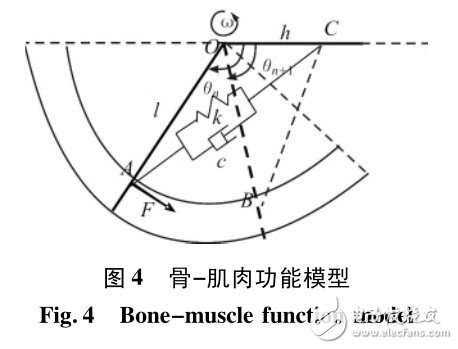
人体运动系统是由骨骼和固着在骨上的肌肉组成的,肌肉的收缩和舒张牵动骨骼,使人体能够进行各种运动。 由于人体结构和功能的特殊性和复杂性,将人体下肢作适当简化及必要的假设后,对人体下肢建立其功能模型,图 4 为下肢的小腿部分骨-肌肉功能模型。 这里,骨骼简化为棍状结构体,肌肉简化为由弹簧-阻尼组成的阻抗模型。 其中: k 和 c 分别表示弹性系数和阻尼系数,并忽略了由摩擦力和机械传动阻力引起的未知干扰,模型的运动方程为:

其中: M 为肌肉产生的力矩[N·m],I 为转动惯量 [kg·m2],β 为关节角加速度 [rad/s2],ω 为关节速度 [rad/s],θ 为关节角度 [rad]。
肌力的产生是由肌肉的收缩和舒张所引起的,由力矩定义可知:

其中:
其中: x 表示肌肉在收缩与舒张中的长度变量,由图 4 可知,x 可按下式计算:

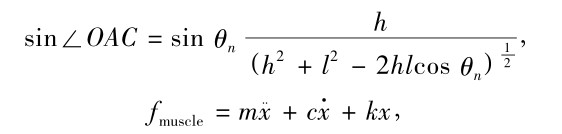
人在行走时,主要是通过髋关节及膝关节的屈伸运动来实现其行走功能,双腿的摆动多分布于矢状面内。 助力机器人的助力机器臂可以看作为一个开式运动链,它是由一系列连杆通过转动关节串联而成,开链的一端固定在腰带上,末端安装有特别制作的金属鞋底,髋关节及膝关节屈伸运动由伺服电动机驱动,关节的相对运动导致连杆的运动,使助力腿完成类似人的下肢步行动作。
步行助力机器人与人体下肢通过束带紧密联系在一起,如图 5 所示,步行助力机器人的最终运动是通过位于使用者与装置间的各测力点感受到的人体运动时的多维力信息来完成自主运动,不需要任何操纵台或外部控制设备,形成一个高度自动化的人-机混合系统。 助力机器人要达到助力的功能,首先,对使用者下肢运动预判;其次,助力装置除克服自身动力矩(主要由装置自身重量引起的重力矩)外,还要降低人体肌肉对关节所能产生的力作用,即降低肌力,从而达到助力的目的。 结合装置自身的动力矩,对式(3)进行如下调整:

其中: Mexoskeleton是对外骨骼装置进行动力学分析后的关节动力矩; μ 为修正因子;助力机器人连杆装置的转动惯量计算如下:

近似计算人体各段转动惯量的公式如下:

其中: X1为体重[kg]; X2为身高[cm]; Bi0,Bi1,Bi2为二元回归方程系数。
同时,角加速度可表示如下:

其中: dt 可以近似地认为是实际控制系统中的控制采样周期 T ,即 dt =·T ,整理合并后可得:

式(7)所确立的力与角速度间的对应关系式是建立在人体肌肉功能模型之上,是形成系统伺服规则的重要依据。
5 实验
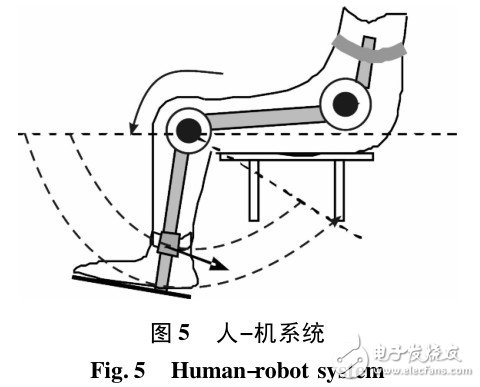
实验以原型样机为对象,利用人-机间的交互力传感器进行人-机行走实验,除使用者手拿一个紧急停止按钮外,整个过程由计算机独立控制,无任何操纵杆或控制面板。 图 6 是人-机混合系统控制框图,图7 是单腿混合助力系统运动时的输出响应曲线。 图7 中,根据人-机间交互力的方向与外骨骼助力机器人关节旋转方向的关系,把系统的每个往复运动分为过渡和助力两个阶段,由图 7 可知,助力阶段所占比例越大,则助力效果就越明显。 通过进一步调节控制模型中的弹性系数及阻尼系统可以改变过渡和助力两个阶段的相对占有时间。
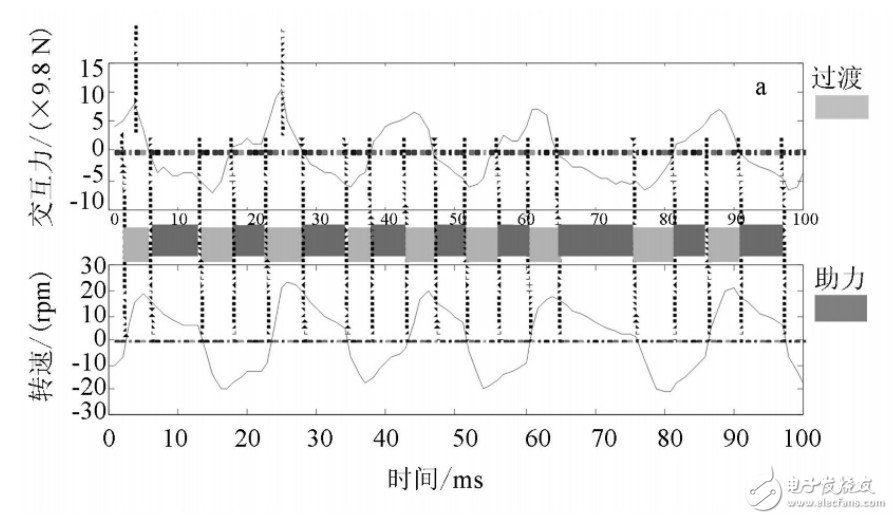
a:右小腿
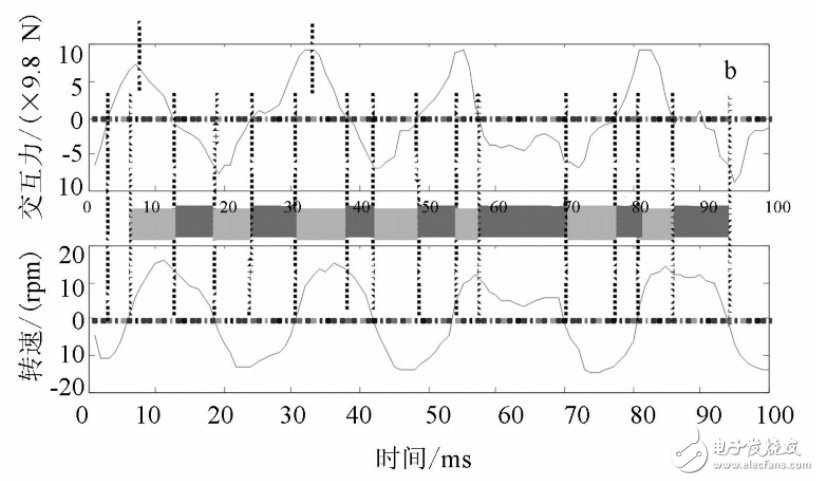
b:右大腿
6 结语
实验表明,基于人体肌肉功能模型的控制方法可以为人体下肢运动提供助力支持,该方法与假想柔顺控制方法相比,可降低系统对人-机交互信息的依赖性,但此方法需要提供必要的人体参数,如下肢各段的长度、各段的转动惯量等,因此它对人体模型的准确性要求较高。"助力多少"是对助力效果最直接的认定,是助力机器人重要性能指标之一,"助力多少"依赖于助力阶段与过渡阶段之间的相对占有时间,对"助力多少"的确定将是作者下一步研究的内容。
——本文选自电子发烧友网2月《可穿戴技术特刊》"透视新设计"栏目,转载请注明出处,违者必究!
- 谷歌眼镜初体验:眨眼拍照、WIFI接入、语音文本转换(03-24)
- 可穿戴设备新趋势:触摸即可发光的“电子皮肤”(06-24)
- 医疗可穿戴智能设备的主要器件:MEMS传感器(02-14)
- 应可穿戴保健设备大势 ADI最新解决方案详解(02-11)
- 可穿戴设备市场起飞,蓝牙Smart引爆设计热潮!(02-17)
- 三星最新曲面Gear Fit最详拆解:内部设计构造大揭秘(04-29)