HERMES与可穿戴外骨骼机器人技术详解
困难的、原本只能靠人类的灵巧与聪明大脑才能完成的任务;而至关重要的是,整个回馈回路的动力以及延迟必须以人形机器人密切管理。
我们在进行动作训练时,必须要先了解产生某个动作的基本原理;在这种案例中,人类本体感受的反射,也就是让身体能正常运作的肌肉、关节与神经肌肉系统之间的聚合,需要50~100ms的反应时间,而视觉处理反应时间约是200~250ms。这种了解有助于实现机器人操作员在远程操控机器人执行任务,就像他们自己在现场一样。
MIT的设计工程师估计,在平衡回馈信息显示为施加于操作员髋部的力道之策略方面,训练后的反应时间应该要藉于人类本体感受反射以及视觉处理之间;为了以非视觉方法证明髋部的力道回馈策略,会以髋部位置量测参考。代表人类本体在髋部感受到的力道输入以及视觉输入。
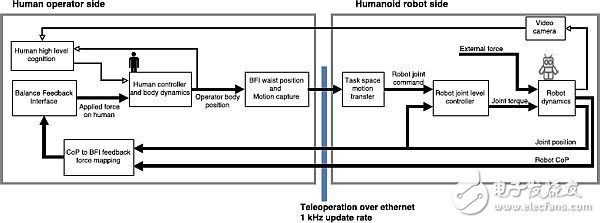
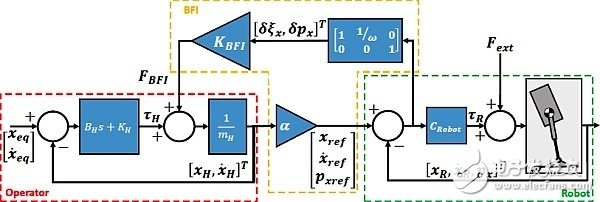
HERMES系统与人类操作员的回馈回路图,操作员以腰部的非视觉力道回馈来稳定平衡回馈回路中的机器人(粗线箭头);而细线箭头指示的是视觉数据以及更高层级感知规划的回馈路径。(来源:参考数据3)
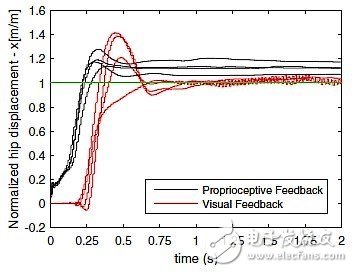
图为来自髋部本体感觉刺激力道以及视觉刺激阶梯输入讯号的人类髋部移位。(来源:参考数据3)

人类-机器人之平衡回馈回路的事件传递流程。(来源:参考数据3)
让HERMES运动的马达
HERMES机器人的设计是在「电源层」(power planes)上运作,以执行大多数需要较高力道的动作;机器人的末端效应器(end effector)运动在那些层中发生,因为机器人上半身的肩部与肘部马达平行轴;在机器人下半身,则是髋部与膝部马达是在电源层中运作。在人形机器人无法触及某个位置的特定区域时,机器人就能轻松重新定向以执行例如敲击、丢掷或拉抬等任务。
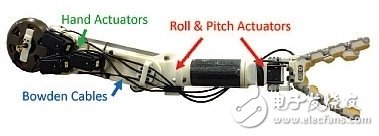
人形机器人的设计会将大多数致动器放在动力马达层;HERMES的致动器设计是大半径间隙(large gap-radius)马达;肩/肘部组合的偏斜(yaw)与滚动(roll)轴以平行致动器机构驱动,包含两个小巧的Dynamixel MX-106伺服致动器以及客制化电子驱动器。那些轻量化的驱动器能在需要时重新导向电源层。
HERMES的右上臂电源层(来源:参考数据3)
HERMES的双脚以及手臂/手掌设计很有趣,双脚包含三个接触点,每个区域都配备了荷重元(load cell),因此每一个荷重元联合起来能提供机器人内部的压力中心估计,如下图中响应支撑多边形(support polygon)的凸包(convex hull)。
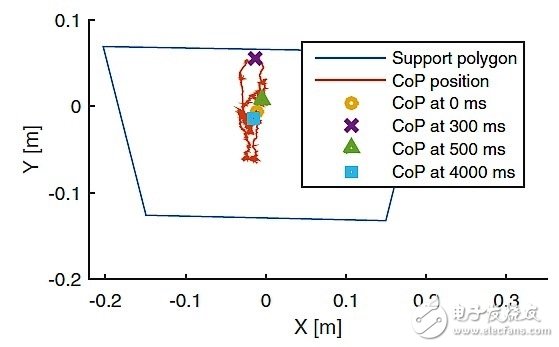
图为机器人脚着地的冲击干扰之后0~4秒,在支撑多边形内的机器人CoP轨迹。(来源:参考数据3)
三个荷重元甚至能在机器人只有单脚接触地面时,提供CoP的最小估计值。
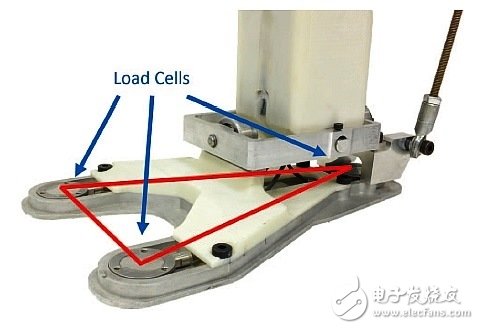
HERMES机器人的脚掌设计可看到荷重元。(来源:参考数据3)
HERMES的手掌能抓取例如钻头等物品、按压钻头触发器,也能握起拳头;而HERMES的手臂、手腕、手掌与指头能灵活动作。

HERMES的手掌能抓取钻头等物品,也能握拳。(来源:参考数据3)
HERMES有双灵活的手。(来源:参考数据3)
HERMES的终极考验
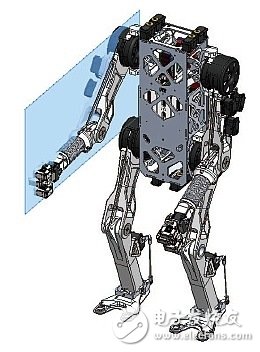
把一堵墙打穿对于人类来说似乎很简单,但HERMES得证明它可以执行这种需要强大力道以及平衡动作的任务,展现人类感知以及此远程操控人形机器人马达技术的整合性能。
HERMES系统架构图。(来源:参考数据3)
叫机器人打墙并不容易,因为需要施加高力道才能击穿一道墙,同时还要维持身体平衡稳定,以及利用身体的力量来冲击墙面。操作员下的第一道指令,是以HERMES内建的摄影机来确定墙的位置,然后寻找一个可以用机器人的单手握住的锚点。
然后操作员让机器人的手抓住锚点,发出「拉」的指令让机器人的身体朝着墙移动,同时用另一只空着的手握拳、向墙面击打。在击穿墙面之后,操作员下指令把墙推开,使机器人足以透过平衡回馈接口的力道回馈重新取得平衡,包括上半身与下半身的定位。
随着我们进入2017年,机器人应用呈现令人兴奋的商机;尤其是与人工智能的结合(尽管有许多争议),将会改变我们所知的世界。
参考数据:
1. Robot-Human Balance State Transfer during Full-Body Humanoid Teleoperation Using Divergent Component of Motion Dynamics, Joao Ramos, Albert Wang, and Sangbae Kim, 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, May 16-21, 2016
2. Constructing IMU Based On ADC and Sensors Calibration for Ballbot, Hosein Zabihi Kheibari, Mahdi Akbari, Atefe Sadat Moosavi Neja
- 谷歌眼镜初体验:眨眼拍照、WIFI接入、语音文本转换(03-24)
- 想做谷歌眼镜开发者 需要注意11点(05-04)
- 可穿戴设备掀智能技术新浪潮(06-10)
- 可穿戴设备新趋势:触摸即可发光的“电子皮肤”(06-24)
- 医疗可穿戴智能设备的主要器件:MEMS传感器(02-14)
- 应可穿戴保健设备大势 ADI最新解决方案详解(02-11)