三方面详解如何为机器人构建起一个“三维世界”
实现机器人三维视觉系统的最主要也是最关键的传感器,三维数据的获取质量直接影响了移动机器人后端的算法结果与决策控制。

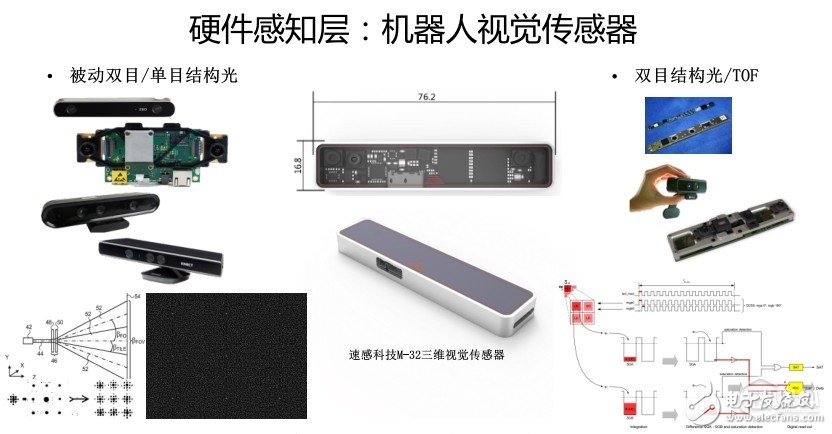
目前实现三维深度传感器的主流技术大体在2010年后发展起来,路线有以下几类:基于单目结构光技术路线、基于双目结构光技术路线以及基于飞行时间法技术路线。速感科技在今年的11月份,面向服务机器人厂商推出的M-32三维传感器就是基于其中的双目结构光原理实现的,且集成嵌入式视觉算法的视觉传感器。结构光的原理是利用激光的光学衍射原理,通过传感器投射出特定的图案,用以加速或辅助深度图的获取。其中特定的图案可以分为规则、伪随机或随机点状散斑和特殊图形斑几类,其优势在于精度高,刷新率快,但缺点是不适合在户外强光下的环境进行使用。飞行时间的原理也称TOF原理,是利用调制光源在不同距离接收到的相位不同从而根据光的传播速度反算距离这一原理实现的深度获取,这一原理的优势测量精度不会随着距离递减,但劣势是分辨率低且环境扰动大。
基于视觉的机器人感知技术SLAM
讲到基于视觉的机器人感知算法原理,就不得不提到这两年大火的SLAM技术。 SLAM (simultaneous localizaTIon and mapping,即时定位与地图构建。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
我和我的合伙人2012年开始接触这一技术,到2014年创业的时候,除了国内一些研究机器人自动化技术的实验室和老师,几乎做图形图像的学术圈都没怎么听说过SLAM,更不用说当时的创业公司和资本市场。而今天,几乎整个人工智能领域似乎都对SLAM这一技术报以了极大的关注度与期望,这实际上是和这一技术在今天对于机器人和人工智能的重要地位以及代表性产品的推出是分不开的。我认为SLAM技术在资本市场上获得极大的关注度有很大一部分原因是去年美国明星创业团队Magic Leap在AR领域的技术探索,微软公司在去年推出的Hololens以及今年10月份Google开源了一套SLAM算法密不可分的。由于在这之前,大家都没有听说过SLAM这一技术,更不必说意识到这一技术在2010年后在机器人领域取得突飞猛进的进步。当有代表性的产品或者公司将这一技术运用起来,便一下子引起了大家的关注。
今天我和大家介绍一些2010年后随着三维视觉传感器的兴起,SLAM的进一步演进,也就是今天我们应用在各种移动机器人上的vSLAM(基于视觉的同时定位与构图技术),是如何建立起来并且被应用在机器人的自主导航、路径规划等方案中的。
从2012年开始在实验室的接触研究,再到后来成立速感和同事们推进技术的迭代中,我觉得对于SLAM到今天为止,有三个里程碑式的事件:
2000年左右的国际机器人研讨会上,首次给出了SLAM这一基本框架和收敛性的验证结果,并针对这一理论给出了具体的证明和结论,自此,以MIT、悉尼大学为代表的研究移动机器人地图构建和定位的学术圈前辈才正式开始致力于SLAM技术的研究,补充并完善的给出了SLAM的技术可行性依据。在这之前尽管SLAM这一理论被提出有10年之久,但学术圈普遍认为这一理论得到的地图估计误差是不收敛的,因此不能通过处理一个同时包含机器人定位与特征路标位置的联合状态对模型进行求解从而得到结果;
2011年前后,正好是我进入到实验室,和实验室的师兄师弟开始对无人机视觉系统的定位定姿与地图构建进行系统性的学习与开发的阶段,以Kinect 1为代表的视觉传感器开始在SLAM研究领域兴起,为SLAM的大踏步发展奠定了底层硬件上的基础契机。从整个机器人视觉系统的发展历程来看,任何一个关键技术的应用需要一个较长时间的技术转化周期,而突破性的进展离不开底层关键元器件、计算芯片或传感器的支持。而我认为,三维视觉传感器的兴起正是为SLAM的发展提供了这样的关键一步;
从去年开始到今年的这一波世界范围内的人工智能浪潮。诚然我们需要看清楚的是,在这一次人工智能复兴的浪潮中,存在很多被称为"伪命题"的黑科技,但是也要清楚的看到随着深度学习、增强学习以及迁移学习这样基础性的数据训练与学习方式的变革,带动了一批过去我们看来在实际商业化与产品化并不成熟的行业。比如VR/AR,比如无人驾驶,再比如机器人、无人机。很幸运的是,在目前最热的人工智能涉及到的这三个行业中,我们都看到了SLAM的影子,并且看到了这一技术在这其中所发挥出的巨大价值。
今天广泛被人们讨论和学习的vSLAM,简单来说,是SLAM技术发展到今天结合目前的底层技术实现与硬件,离产品化最近的一种表现形式。针对不同
- SLAM技术,让真正的智能机器人触手可及(02-16)
- 机器人自主移动的秘密,从SLAM技术说起(10-21)
- 揭秘机器人自主移动背后技术,从SLAM技术说起(10-22)
- 自主移动机器人的定位与地图创建(SLAM)关键性问题(02-07)
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)