基于ADT850的机器人运动控制系统设计方案
主要介绍了一种移动机器人的运动控制系统硬、软件结构。控制系统是由工业PC,ADT850运动控制卡及相关传感器组成;操作系统采用Windows98系统,采用VisualC++6.0开发,并应用模块化及Windows线程的多任务处理机制实现控制程序设计;根据状态反馈控制理论,设计了移动机器人路径跟踪控制算法。实验论证了此控制系统及控制算法的有效性。
引言
移动机器人是能够在未知环境下自主运动的智能机器人,集环境感知、动态决策与规划、运动控制等多项功能于一体,其中运动控制系统的主要功能是实现对上层规划路径的跟踪[1]。
随着科学技术的发展,人类的研究活动领域已由陆地扩展到海底和空间。利用移动机器人进行空间探测和开发,已成为21世纪世界各主要科技发达国家开发空间资源的主要手段之一。研究和发展月球探测移动机器人技术,对包括移动机器人运动控制在内的相关前沿技术的研究将产生巨大的推动作用[2]。
本文提出了一种基于工业计算机(IPC)及ADT850运动控制卡的移动机器人运动控制系统,实现移动机器人的车体与传感器云台运动控制。采用Windows系统的模块化、多线程软件设计方法,使系统具有较好的开放性,易于功能扩展。针对本系统,提出了一种基于状态反馈的移动机器人路径跟踪控制算法,实现平稳、有效的镇定控制。
1运动控制系统的硬件结构
1.1问题的描述
对于移动机器人的运动控制系统,精确地进行自定位是一个基本的要求。自定位就是获得机器人自身相对于一个固定坐标系的位置和方向角(统称位姿)。因此,从系统硬件层次来讲,移动机器人就必须要有一定的传感器来获得这些位姿信息,如利用固定在驱动轮轴上的光电编码器,通过测量各电机的运动增量推算出机器人的位置,利用光纤陀螺仪测量机器人在水平面的方向角,利用倾角传感器测量机器人与水平面的倾角。另外,移动机器人运动系统还要接收上层决策系统路径规划信息及向决策系统反馈机器人状态信息等,因此要求系统要有较好的通信能力。
1.2硬件系统结构
运动控制系统由计算机系统、传感器系统、驱动控制系统及电源系统等几个部分组成(如图1)。其中,计算机系统采用通用的工控机(IPC),这样保证了整个系统较好的可扩展性。传感器系统包括编码器、光纤陀螺仪及倾角传感器。编码器用来测量车轮的实际转动量;光纤陀螺仪用来测量机器人车体在水平面的方向偏角;倾角传感器则用来测量机器人车体与水平面倾角。驱动控制系统包括ADT850运动控制卡及步进电机驱动器。电源系统采用二组镍氢12Ah电池组分别对计算机系统与驱动系统独立供电,其中计算机系统采用24V直流源,步进电机采用36V直流源,可以支持系统连续工作2~3小时。
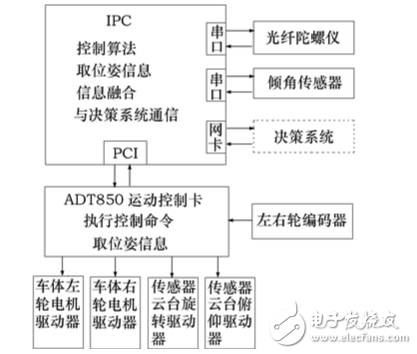
图1移动机器人运动控制系统硬件结构框图
光纤陀螺仪、倾角传感器通过串口向IPC传送移动机器人的姿态信息,编码器采集的移动机器人位置信息,通过ADT850运动控制卡的I/O向IPC传送。IPC获取移动机器人位姿信息后,并作相应融合处理,然后根据上层决策系统提供的路径规划信息,执行相应的控制算法,向运动控制卡发送控制命令。控制命令通过运动控制卡,转换为控制步进电机的脉冲信号。
ADT850运动控制卡是基于PCI总线的高性能四通道伺服/步进控制卡,在本系统中,两个通道分别用于机器人车体左、右轮的驱动控制,另外两个通道分别用于传感器云台的旋转与俯仰运动控制。其脉冲输出方式可用单脉冲(脉冲+方向)或双脉冲(脉冲+脉冲)方式,这里采用前一种方式,最大脉冲频率为4MHz。位置管理采用两个加/减计数器,一个用于内部管理驱动脉冲输出的逻辑位置计数器,一个用于接收编码器输入信号,作为实际位置计数器,计数器位数高达32位。还有到位信号、报警信号、伺服开启信号等外部输入信号接口。提供多种运动控制方式,如定量运动、连续运动、回零运动等。速度控制可用定速和直线或S曲线加减速,可做非对称直线加减速,可用自动或手动减速。每轴有2个32位比较寄存器,用于产生中断或作为软件限位。并且每轴有8个输入信号端,包括2个正负限位信号,3个停止信号,1个伺服报警信号和1个通用输入信号。除限位信号外,其余信号可通过设置成无效来作为通用输入信号。所有数字输入信号均有积分型滤波器,可选8种滤波时间常数,以防止干扰。各轴最高输出速度可以通过设定其倍率参数来决定,因为驱动速度、加/减速度等参数的设定范围只在1~8000之间,若需要设定8000以上的数值的话,就必须提高倍率,但提高倍率后,速度的分辨率会相应地降低。因此,在保证能达到
- 基于运动控制芯片AFDX05的开放式五轴五联动数控系统的应用(09-11)
- 运动控制系统基本架构及控制轨迹要点简述(03-07)
- 基于TMS320LF2407A的机器人运动控制系统软件设计(08-18)
- 基于伺服电机和运动控制器的目标仿真实时性设计(05-22)
- 基于32位DSP及电机驱动芯片的悬挂运动控制设计(09-13)
- 基于Motionchip的直流无刷伺服电机运动控制系统设计(04-19)