基于PLC控制系统的自动寻迹运输车设计
即齿轮转动一周,测速传感器检测到30个脉冲。当运输车运行时,测速传感器不断输出脉冲,其脉冲个数存放到PLC 的内部寄存器中。测速传感器电路设计如图7所示。根据式(3)计算出驱动轮每分钟转动的转数N,再结合驱动轮的直径就可算出运输车当前的运行速度V。
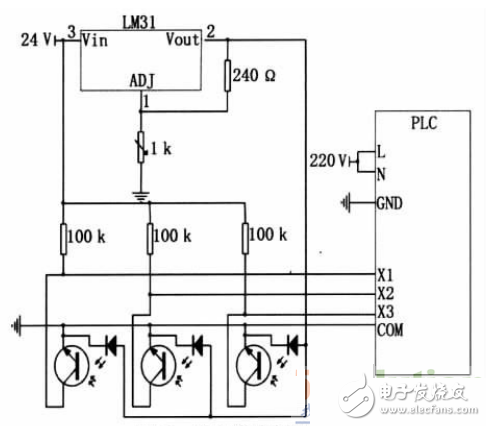
图7 测速传感器电路设计图
式中:n为测速轮每一周测得脉冲数,n=30;D5为测速传感器测速时段输出脉冲个数;t为测速时段的计数时间,ms。
2.4速度控制电路设计
速度控制电路如图8。由传感器采集到的信号输入到PLC上,经PLC处理后传送到Y端,3个输出端Y11、Y12、Y13通过继电器J1、J2、J3分别连接不同的分压电路,电阻值的不同使得所分电压不同,同时电机驱动器(CT一301A9)输出发生变化,从而控制电机转速,实现速度控制。

图8 速度控制电路设计
2.5避障电路设计
障碍物检测电路设计如图9所示。在运输车的四周安装有红外光电传感器,其检测原理与路面检测相似,当运输车运行时,传感器检测到人或其他障碍物,输出为低电平,通过输入端传送到PLC,进行数据处理,输出报警信号,反之,输出高电平。
2.6制动电路设计
制动电路设计如图10所示。运输车遇到障碍物或到站时,需要自动停止。停止由PLC编程控制,因此只需将输出端Y4连接制动装置即可。本设计由继电器J4动作进而通过电感的吸合作用带动绕在驱动轮上的皮带控制运输车的制动。
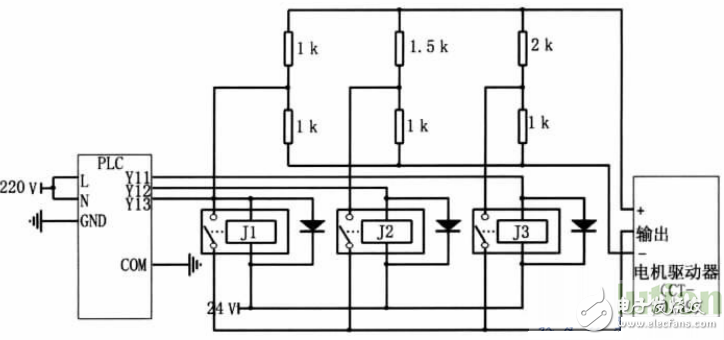
图10 制动控制电路设计
3、系统软件设计
运输车的控制采用模块化的结构,其基本思路是:将位置传感器采集来的道路信息、速度传感器采集来的速度信息和避障传感器检测到的障碍物信息经PLC处理,输出PwM信号到舵机和驱动电机。方向控制和速度控制系统分别构成两个闭环系统,两者可相互影响,比如根据路径识别的结果来控制速度,使得运输车在弯道上慢速,而在直道上快速。软件设计流程图如图11所示。
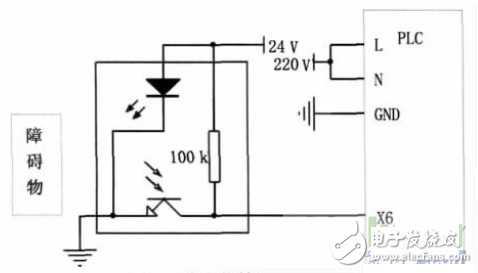
图11 主程序流程图
方向控制:运输车舵机是由舵轮、机械结构、步进电机和控制电路组成的一个位置随动系统。通过内部的位置反馈来实现舵轮输出转角正比于给定的控制信号。本设计将位置传感器反馈的路面信息、测速传感器测得的速度信息和避障传感器检测到的障碍物信息,经过PLC控制单元进行计算并按结果的控制要求向步进电机发出命令(PWM信号形式),通过对步进电机的正反转控制来实现舵轮的正反转,在脉宽改变时,使其自动变化到对应值。
速度控制:直流电机转速的控制采用PWM(脉宽调制)调速方法。为进一步精确控制运输车速度,还需要引入闭环速度控制。利用位置传感器、速度传感器和避障传感器检测到的实时信息与期望速度之间的比较来确定输出到直流电机的PWM信号,从而确定加速或减速强度的大小。
4、结论
本系统采用PLC作为核心控制器,采用机电一体化设计,已完成了样机制作,可实现物料的自动运输,目前处于程序优化阶段。相对于国内常见的轨道运输系统,本系统体积较小、安装方便,轨道铺设简单,根据生产工序粘贴轨道纸便可实现无人驾驶;生产工序改变时,无需重新铺设铁轨,不破坏路面,从而确保了自动运输车的平稳运行。该系统基于光学引导的思路实现简单,导向可靠,可以大幅度降低生产成本,有利于更加广泛推广和应用。该系统采用触摸屏对自动寻迹运输车进行控制,直接选择屏幕上的菜单,便可操作运输车。该系统配备了自动检测、报警及避障装置,更加安全可靠,大大减少了不安全事故的发生。
PLC 相关文章:
- PLC电源模块维修技术实例(07-17)
- PLC及变频调速技术在泵站恒压供水中的应用(01-06)
- 台达变频器结合PLC与人机界面在中央空调上设计应用(06-27)
- PLC-变频器在起重机电控系统中的应用(08-28)
- PCC在人工模拟降雨控制系统中的应用(04-25)
- 变频器在地毯纺织机械中的应用(10-29)