基于CDMA和CAN总线的车辆远程故障诊断系统
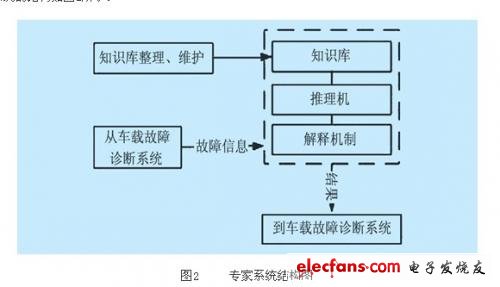
得出诊断结果。专家系统的结构如图2所示:
知识库的建立直接关系到车辆信息技术服务中心服务质量的高低,也影响着车主是否大量采用这个系统,所以收集,整理专家知识的工作特别重要,其难点主要在 于专家知识的收集与表述。因为现在的汽车制造厂商十分繁多,具体的车系更多。虽然现在大部分车辆都提供OBD-II接口,但是从接口中读出的故障码的信息 十分有限;各大汽车生产厂商检测故障用的手持设备与OBD-II通信的协议也各不一致,而且得到的故障码包含的信息大量的是靠维修工人的经验来判读。所以 专家知识的积累与整理显得十分重要。
在归纳知识时要考虑的因素很多, 为了充分利用专家系统的符号推理能力, 凡是能用数学公式描述的知识, 均作为具体求解器的方法实现,其余的作为规则存储于知识库。
规则知识的表示形式为:
规则号 if (前提) then (结论)
前提是一个条件或几个条件的"and"形式,若是后一种情况,只有在几个条件都成立时,结论才被接受。每个条件可以是若干项的"or"形式。
以下是一条具体的规则:
rule5:
if
(1) 收到故障码:p0201
(2) 收到故障码:p0202
(3) 收到故障码:p0203
(4) 收到故障码:p0204
(5) 发动机缸数:8
then
发动机喷油嘴故障严重,需马上修理。
推理机设计时本系统采用了两级es推理控制策略。结合领域知识,将总体故障分析求解任务分解为不同的子任务,如发动机故障分析子任务、轮胎故障诊断子任 务等。每个子任务有各自的目标求解变量,服从不同的求解方法,彼此之间既相互独立又存在着相互联系。通过正向推理求解其目标变量,并将所求结果显示给车主。
而汽车故障诊断的各子任务间是有一定的依赖关系的,各子任务的求解是有一定的前提条件的,例如,气缸喷油嘴子任务的求解必须在油嘴线路电压已知 的前提下才能进行,因而,各求解器中都设置了激活条件,只有满足了这些条件,求解器才能被激活从而进行目标变量的求解。元级推理机利用此关联对象集信息按 一定的顺序激活相关的求解器进行重新推理。
解释机制通过与推理机输出的数据, 回答用户提出的how、why、what、whether等问题。
3.2 车载故障诊断单元软件设计
车载故障诊断单元主要负责车载故障数据的读取,并通过无线网络()将故障码实时送到远程车辆信息技术服务中心,简单的故障信息,如:一般故障 (不用马上处理),故障(需马上修理),严重故障(需请求交通拯救)需要及时反馈给车主(包括以文字的方式反馈到车主车载屏上,更紧急的时候通过语音或者 视频对话来沟通)。更详细的故障情况车主可以通过移动电脑或者移动电话访问相关远程车辆信息技术服务中心的网站来获取。
车载故障诊断单元的主程序在执行完初始化功能,再根据当前故障状态位的值设置定时中断的时间后,然后就进入低功耗模式。单元读取故障码和其他运行数据,以及这些数据的传 输都放置在中断程序,中断结束立即进入低功耗模式。车辆故障状态位正常时,可取60min定时中断一次,调用crc-16校验计算执行库后,通过无线方式 发送给远程车辆信息技术服务中心。在故障状态位出现多位数值为"1"时,缩短定时中断时间,增加数据采样及发送频率。定时中断程序流程如图3所示:

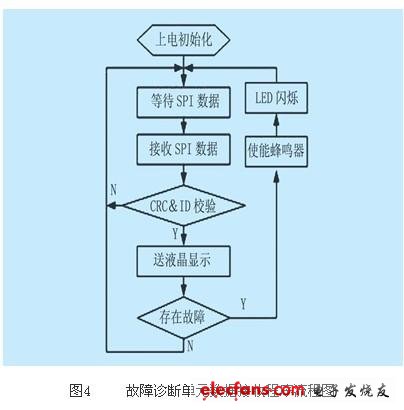
数据接收程序在主程序完成初始化功能后,模块进入等待SPI数据工作状态。在接收到一个数据帧,crc校验(采用查表法实现,减小微控制器cpu占用时 间)和车辆信息技术服务中心id判断无误后,送液晶显示并点亮相应的指示灯以表示各模块工作正常。当某个模块出现故障时,启动led闪烁警告或蜂鸣器报 警。程序流程图如图4所示。
4 硬件设计
4.1 车载故障诊断单元
车载故障诊断单元主要由无线模块(模块),微控制器(PIC16F874),CAN收发器(MCP2551),CAN控制器(MCP2510)组成,硬件结构如图5所示。车载通信协议统一采用CAN总线。

Microchip公司的单片机PIC16F874采用risc指令系统,哈佛总线结构,低功耗,高速度。内部集成了ADC、串行外围接口 (SPI)和Flash程序存储器等,具有pwm输出、lcd驱动等功能。PIC16F874通过SPI接口可以实现与CAN控制器MCP2510的无缝 连接。PIC16F874的I/O资源丰富,共有五个I/O口,每个I/O口除了基本用途外还有一些特殊功能。
CAN通信模块由CAN 控制器MCP2510和CAN收发器MCP2551组成。MCP2510可以完成CAN总线的物理层和数据链路层的所有功能,支持高速SPI接口(最高数 据传输速率可以达到5mb/s),支持CAN2.0a/CAN2.0b
- 助力医生减负,未来电脑技术诊断更精准(11-07)
- 在TD-SCDMA手机设计中利用MAX2392满足T3R4的(02-21)
- CDMA移动台功率控制与校准的工程实现(02-06)
- 如何提高TD-SCDMA网络容量及质量(03-12)
- BA012Fx功放在WCDMA数据卡数据传输中的应用(08-02)
- 基于GPRS/CDMA1X的公用移动网络平台的无线路由器的设计(05-11)