扩频通信在遥控系统中的应用
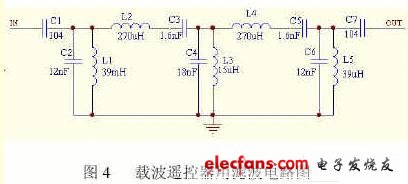
设置参数的发送任务和对方接收成功的反馈信号。单片机将发送信号通过串口发给SC1128将信号进一步处理后,发给信号放大器,再经过高频耦合变压器传到电焊机输出电缆上,安装在电焊机中的接收部分将此信号取出,滤波放大后给SC1128。SC1128和MCU的接口电路上面已经做了介绍,如图2所示。接收部分的工作原理和发送处是一样的,这里不再累述。接口单元中由一个带通滤波器和对电焊机输出电压的整流部分组成。这里介绍一个实用的滤波器,很适合处在电磁干扰很强的电焊机使用。该滤波器为带通滤波器。其不仅要将带外杂波滤除,还要保证前后级之间的阻抗匹配,以达到顺利传递信号的目的。由于主晶振的工作频率不同,载频也不同;调制周波数和数据传输速率不同,带宽也不同。因此,滤波器的参数在主晶振频率不同时也将有所变化的。本文设计的载波遥控器选用10MHz的晶振频率,数据速率是1Kbps、四周波调制、250KHz载频,带宽为100KHz(200~300KHz)。对于载波遥控器的控制信号而言,1Kbps的数据传输速率已经足够。
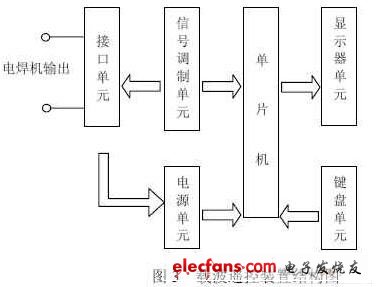
硬件电路的设计注重信号的隔离、分立元件的参数选择、芯片的驱动能力和整个载波遥控器的可靠性。电源单元做好降压的同时,保证尽量减少干扰,选用稳压芯片UPC7805,输入端加上共扼滤波磁环,为MCU和SC1128提供稳定的供电。因为载波遥控器体积较小,应充分考虑散热问题,在选择相关的电阻、电容、晶体管时,需慎重分析它们在最大负荷下的功耗参数。显示器单元由3位8段共阳数码管来完成,和MCU通过74HC573并行传输数据,采用动态扫描的方式。按键选用欧姆龙公司的B3W-1042系列产品,以保证可靠性。
2.3 软件系统设计
a.软件部分围绕单片机和SC1128的通信来完成,主程序流程图如图5所示。
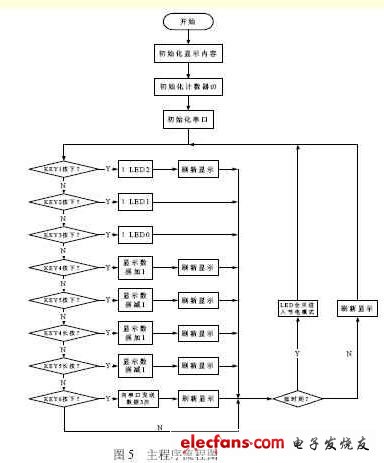
利用MCU实现数码管显示、按键操作的输入都是很简单、很通用的技术,这里不再介绍。
b.SC1128和MCU的通信:
SC1128和MCU的连接如图2所示。SC1128发射或接收数据是通过SR(发射/接收控制端)、TX(发射/接收数据端)和SYN(发射/接收同步脉冲端)三个端进行的。SR=0电路处与接收状态, SR=1电路处与发射状态。
发射状态:当SR=1,发射/接收同步脉冲端SYN输出同步脉冲。当电路处于发射状态时,电路内部在SYN的上跳沿对TX端输入的数据进行锁存,所以外部MCU应当在SYN的上跳沿保持TX端的数据不变化而在SYN的下跳沿可以给出发射的数据。
接收状态:当SR=0,电路处于接收态, SYN端不会立刻输出同步脉冲,只有当电路接收到的数据与本电路"同步"之后,SYN端才能输出同步脉冲。SYN端输出上跳沿时接收数据从TX端锁存输出,并一直保持到下一个上跳沿,因此MCU应在SYN同步脉冲的下跳沿之后从TX端读出数据。
3. 结论
扩频通信芯片SC1128和MCU的结合应用,使得载波遥控器具有很强的抗干扰能力,功能多样并可进行扩展,人机交互界面良好。新技术的应用有效地解决了传统有线遥控器的缺点,具有很大的推广价值。
本文作者创新点:本文利用扩频通信技术实现的电焊机载波遥控器克服了工业现场长距离通信带来的弊端,实现了快速、高精度、灵活、多功能的信号传输控制,解决了远距离信号传输的不可靠性问题,同时提供了良好的人机互动界面。
- 各大厂商无人机遥感技术大PK(03-22)
- 扩频技术详解(10-07)
- 一种长周期扩频码的设计(10-07)
- RF2903的原理及在扩频通信中的应用(02-11)
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)