一种GPS的智能移动终端的应用
GPS 是英文Global PosiTIoning System(全球定位系统)的简称,而其中文简称为"球位系"。GPS的空间部分是由24颗工作卫星组成,它位于距地表20200km的上空,均匀分布在6 个轨道面上(每个轨道面4 颗) ,轨道倾角为55°。此外,还有3 颗有源备份卫星在轨运行。
GPS模块
设计采用u-blox公司的GPS接收模块nr-86,该模块体积小重量轻,集成高灵敏度、低功耗的NemeriX芯片方案于设计中。本模块能快速定位, 1Hz导航更新频率,并可以对16颗卫星进行同时跟踪。支持WGS-84的数据协议。它接口简单,TTL电平串口输出NMEA-0183格式的数据,只须连接模块的TX端与51单片机的RX端,另外单片机P1.0与模块的RESET端相连,以控制模块复位。本设计采用NMEA默认格式中的$GPRMC协议,是由于该协议精简,信息覆盖面广,数据容易被单片机采集处理。
调制解调芯片MSM6882
在设计时,89S52单片机通过同步串口与该芯片相连,然后由芯片把信号调制到模拟信道,再将信号加载到对讲机(PTT)上,由对讲机实现无线传输。单片机CLK引脚的输入时钟周期应在0.42μs到1.35μs范围内,通过可调电阻调节调制信号输入到电台的幅值。信号一路经信号限幅后送入MSM6882的AI引脚,另外一路经放大、检波、幅值比较后送
入单片机,以作为载波检测信号。当系统检测到该信号时,可以采取延时发送的方式来避免同频干扰和信道阻塞。
语音合成芯片XF1M01
语音合成芯片 XF1M01通过异步串口接收待合成的文本,它内含GB-2312汉字字库,外接单支三极管驱动扬声器,即可实现文本到声音(TTS)的转换,设计中音频输出通过功放再送给扬声器,以获得较大音量,适应户外环境。只须送给它汉字的内码(即16位二进制字符),即可读出一字,多送多读,因此对存放空间的要求要低,适合电子巡查系统的应用。芯片空闲时Ready端输出低电平,因此将其连至单片机P3.2,单片机即可扫描该引脚,当芯片空闲时就通过异步串口给它发送数据。传输波特率由Baud_0、Baud_1两个引脚决定,设计中采用的是9600bps。单片机的P1.1与芯片RESET端相连以控制芯片复位。
以往的保安巡查没有太多设备,人均一个对讲机,一条警棍。随着GPS的出现,基站即总台对每个保安的地理位置信息的掌握成为可能。即每个保安配备一套GPS定位设备,以及一套将自身位置信息发送给总台的无线收发设备。由于给每个保安重新配备一套设备成本高昂,而且淘汰已有的对讲机不够现实,于是,将对讲机作为已有的信道载体,便一举两得,只须对旧的对讲机作局部电路的调整修改,就能既方便又实际地构筑前所未有的安全体系。

图1 电子巡查系统应用
利用主板与各个功能模块的结合组成移动智能终端。它包括MCU即单片机AT89S52、GPS接收模块、模拟调制解调芯片MSM6882、液晶显示模块LCD1602、语音合成芯片XF1M01,见图2。
移动智能终端完成正向GPS数据采集、处理和发送,以及反向对总台命令进行接收、识别、执行。
其中GPS模块一秒钟输出一次GPS信息,MCU将其收录,并在显示模块上显示自身经纬度和时间日期。然后通过调制解调芯片将数据加载到对讲机然后无线传输给总台,完成正向任务。
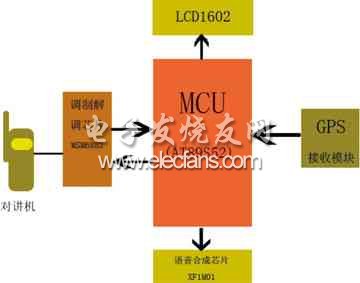
图2 智能终端结构
接着会有大约半秒种时间段等待总台命令,若收到总台的命令,即根据数据帧判断命令类型,提取相应数据,经MCU处理后执行相应的显示操作和语音提示操作,完成反向任务。
当终端接收到目标命令信息并处理执行后,重新发送回总台时前导码改变以表示命令接收成功,使总台作出相应处理。例如前导码可以从"start"变成"start1"。
和以往功能单一,界面欠缺人性化的便携式设备相比,这个GPS数据采集处理传输一体化智能终端有了功能的扩展。首先,每个保安可以在LCD显示屏上看到自己的所在经纬度、时间日期等信息,给保安一个直观,清晰的地理位置感。另外,可以实时接收来自总台的命令信息,经MCU处理后,将总台派遣前往的地点经纬度现实在LCD屏幕与自身位置加以对比,实现信息的透明化。另一个改进是语音提示智能化以及角度偏置的计算,通过接收总台发出的目标派遣地点经纬度,与自身位置比较后,明确清晰地提示保安该往什么方向走多远。系统终端采用51系列的单片机作MCU。用调制解调芯片把信号加载到对讲机实现无线传输代替独立的无线通信模块。液晶屏选取简单易用的LCD1602。方案大大降低成本,而且稳定可靠。
系统必须制定一个合理的流程(图3)以便充
- 基于暂态行波法的配电网故障定位装置研究(02-01)
- 车载GPS导航仪供电方式深度解析(04-17)
- 基于GPS定位的嵌入式系统在汽车监控器设计中的应用(04-16)
- 车用影音及GPS技术发展与应用(10-13)
- GPS集中差分技术在城市车辆智能交通管理中的应用(04-16)
- 根据GPS全球定位技术在医疗监护装置中的应用(03-21)