方向阀在换向与锁紧回路中的应用
方向阀在换向与锁紧回路中的应用
方向阀在换向与锁紧回路中的应用Direction Valve Used in Reversal and Locking Loop
在液压系统中,工作机构的启动、停止或变换运动方向等是利用控制进入执行元件油流的通、断及改变流动方向来实现的。实现这些功能的回路称为方向控制回路。方向阀主要用于通断控制(On-off Control)、换向控制(Reversal Control)、锁紧(Locking)、保压(Sustaining)等方面。
5.4.1 换向回路 Reversal Circuit
(1)简单换向回路
件单换向回路,只需在泵与执行元件之间采用标准的普通换向阀即可。
(2)复杂换向回路
当需要频繁、连续自动作往复运动且对换向过程有很多附加要求时,则需采用复杂换向回路。
对于换向要求高的主机(如各类磨床),若用手动换向阀就不能实现自动往复运动。采用机动换向阀,利用工作台上的行程块推动(联接在换向阀杆上的)拨杆来实现自动换向,但工作台慢速运动时,当换向阀移至中间位置时,工作台会因失去动力而停止运动(称“换向死点”),不能实现自动换向;当工作台高速运动时,又会因换向阀芯移动过快而引起换向冲击。若采用电磁换向阀由行程挡块推动行程开关发出换向信号,使电磁阀动作推动换向,可避免“死点”,但电磁阀动作一般较快,存在换向冲击,而且电磁阀还有换向频率不高、寿命低、易出故障等缺陷。
为解决上述两个矛盾,采用特殊设计的机液换向阀,以行程挡块推动机动先导阀,由它控制一个可调式液动换向阀来实现工作台的换向,既可避免“换向死点”,又可消除换向冲击。这种换向回路,按换向要求不同可分为时间控制制动式和行程控制制动式两种。
①时间控制制动式换向回路 Time Control Brake Reversal Circuit
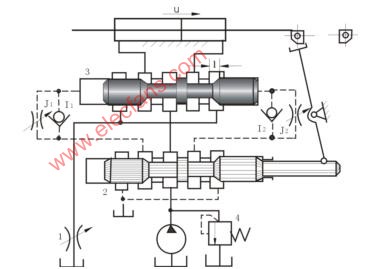
图5.25 时间控制制动式换向回路
l—节流阀;2—先导阀;3—换向阀;4—溢流阀
如图5.25所示,这种回路中的主油路只受换向阀3控制。在换向过程中,例如,当先导阀2在左端位置时,控制油路中的压力油经单向阀人通向换向阀3右端,换向阀左端的油经节流阀J1流回油箱,换向阀芯向左移动,阀芯上的制动锥面逐渐关小回油通道,活塞速度逐渐减慢,并在换向阀3的阀芯移过l距离后将通道闭死,使活塞停止运动。换向阀阀芯上的制动锥半锥角一般为 1.5°~3.5°,在换向要求不高的地方还可以取大一些。制动锥长度l可根据试验确定,一般取 l=3~12mm。当节流阀J1和J2的开口大小调定之后,换向阀阀芯移过距离l所需的时间(即活塞制动所经历的时间)就确定不变(不考虑油液粘度变化的影响)。因此,这种制动方式被称为时间控制制动式。这种换向回路的主要优点是:其制动时间可根据主机部件运动速度的快慢、惯性的大小通过节流阀J1和J2的开口量得到调节,以便控制换向冲击,提高工作效率;此外,换向阀中位机能采用H型,对减小冲击量和提高换向平稳性都有利。其主要缺点是:换向过程中的冲出量受运动部件的速度和其它一些因素的影响,换向精度不高。这种换向回路主要用于工作部件运动速度较高,要求换向平稳,无冲击,但换向精度要求不高的场合,如用于平面磨床和插、拉、刨床液压系统中。
②行程控制制动式换向回路 Travel Control Brake Reversal Circuit
如图5.26所示,这种回路中的主油路除受换向阀3控制外,还受先导阀2控制。当先导阀2在换向过程中向左移动时,先导阀阀芯的右制动锥将液压缸右腔的回油通道逐渐关小,使活塞速度逐渐减慢,对活塞进行预制动。当回油通道被关得很小(轴向开口量尚留约0.2~0.5mm)、活塞速度变得很慢时。换向阀3的控制油路才开始切换,换向阀芯向左移动。切断主油路通道,使活塞停止运动,并随即使它在相反的方向起动。这里,不论运动部件原来的速度快慢如何,先导阀总是要先移动一段固定的行程l,将工作部件先进行预制动后,再由换向阀来使它换向。所以这种制动方式被称为行程控制制动式。先导阀制动锥一般取长度l=5~12mm,合理选择制动锥度能使制动平稳(而换向阀上就没有必要采用较长的制动锥,一般制动锥长度只有2mm,半锥角也较大。
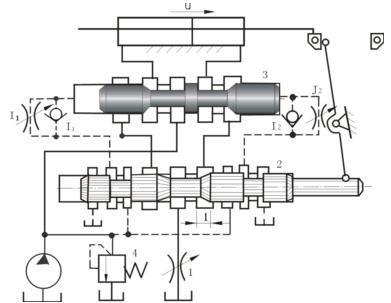
图5.26 行程控制制动式换向回路
l—节流阀;2—先导阀;3—换向阀;4—溢流阀
行程控制制动式换向回路的换向精度较高,冲出量较小;但由于先导阀的制动行程恒定不变,制动时间的长短和换向冲击的大小就将受运动部件速度快慢的影响。所以这种换向回路宜用在主机工作部件运动速度不大,但换向精度要求较高的场合,如磨床液压系统中。
5.4.2
阀 相关文章:
- 详解XC866步进电机阀门控制系统(03-13)
- 老师好带你了解排气阀门(06-29)
- 电气原理图的电磁阀符号介绍及原理图(07-09)
- DBB和DIB阀门的优势和实际应用(11-07)
- 如何通过数字控制阀增加空压机的运行时间(11-06)
- 三种减小阀门填料摩擦力方法(11-06)