GPS技术基础及GPS接收器测试(下)
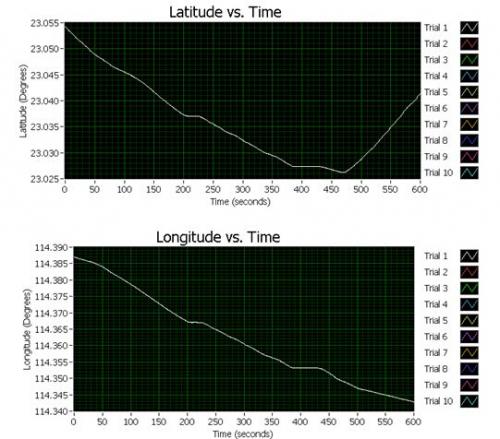
图27与28.每4分钟所得到的接收器经纬度
在图27与28所呈现的数据中,即使用已记录的驱动测试信号,取得统计、定位,与速度的相关信息。此外我们可观察到,在每次的测试之间,此项信息具有相对的可重复性;即为每个独立轨迹所呈现的差异。事实上,这就是我们最需要的接收器可重复性(Repeatability)。由于可重复性信息将可预估GPS接收器精确度的变化情形,因此我们亦可计算波形各个样本之间的标准误差。在图29中,我们在各次同步化取样作业之间,绘出标准的定位误差(相对于平均位置)。
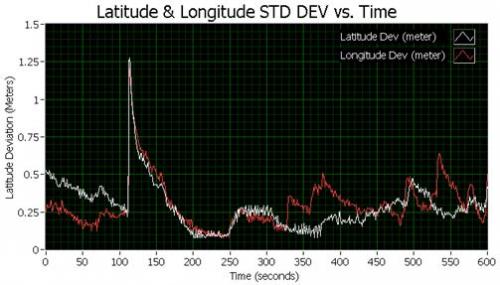
图29.依时间取得的经度与纬度标准误差
当看到水平标准误差时,可注意到标准误差在120秒时快速增加。为了进一步了解此现象,我们亦根据接收器的速度(m/s)与C/N值的Proxy,绘出总水平标准误差。而我们预先假设:在没有高功率卫星的条件下,卫星的C/N比值仅将影响接收器。因此,我们针对接收器所回传4组最高高度的卫星,平均其C/N比值而绘出另1组C/N的Proxy.结果即如下列图30所示。
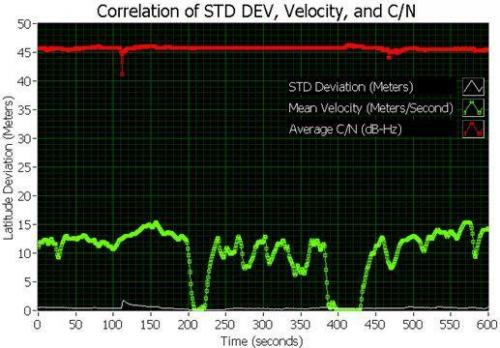
图30.定位精确度与C/N值的相关性
如图30所示,在120秒时所发生的峰值水平错误(标准误差中),即与卫星的C/N值产生直接关联,而与接收器的速度无关。此次取样的标准误差约为2公尺,且已低于其他取样约10公尺的误差。同时,我们可发现前4名的C/N平均值,由将近45dB-Hz骤降至41dB-Hz.
上述的测试不仅说明C/N比值对定位精确度的影响,亦说明了已记录GPS数据所能进行的分析作业种类。在此测试中的GPS信号驱动记录作业,是在中国深圳(Shenzhen)北方的惠州市(Huizhou)所进行。并接着于德州奥斯汀(Austin Texas)测试实际的接收器。
结论
如整篇文件所看到的,目前已有多项技术可测试GPS接收器。虽然如灵敏度的基本测量,最常用于生产测试中,但是此测量技术亦可用于检验接收器的效能。这些测试技术虽然各有变化,但是均可于单一PXI系统中全数完成。事实上,GPS接收器均可透过仿真或记录的基带(Baseband)波形进行测试。透过整合的方式,工程师可执行完整的GPS接收器功能测试:从灵敏度到追踪其可重复性。
参考数据
[1] Pratt, Bostonian, and Allnutt. Satellite Communications
[2] Navstar GPS User Equipment Introduction, September 1996
[3] Gu, Quzheng, RF System Design of Transceivers for Wireless Communications, Springer, 2005. Fundamentals
[4] Ward, Phillp W., Betz, John W., and Hegarty, Christopher J. Chapter 5: Satellite Signal Acquisition, Tracking and Data Demodulation, excerpt from: Understanding GPS: Principles and Applications by Elliot D. Kaplan, Artech House, 2005.
[5] Global Positioning System: Theory and Applications, Edited by Bradford W. Parkingson and James J. Spilker
[6] Braasch, Michael S. and Van Dierendonck, A. J. GPS Receiver Architectures and Measurements, Proceedings of the IEEE, 1999.
[7] Global Positioning System Standard Positioning Service Signal Specification, 1995.
[8] Global Positioning System Standard Positioning Service Signal Specification. Annex A, Standard Positing Service Performance Specification, 1995.
[9] Goldberg, Hans-Joachim. Atmel Whitepaper: Measuring GPS Sensitivity, 2007.
- GPS技术基础及GPS接收器测试(上)(07-06)
- GPS技术基础及GPS接收器测试(03-23)
- GPS技术基础及GPS接收器测试(下)(10-22)
- 基于虚拟仪器技术的短波电台自动测试系统(10-23)
- ATE开放式体系结构的硬件基础(10-30)
- 基于PXI的便携式测控系统(10-30)