基于统计分析的地磁车位探测器在线标定方法
针对地磁车位探测器的标定值不稳定的问题,研究了地磁车位探测器标定值的变化特点,提出了一种地磁车位探测器的在线标定方法。该方法可实现在线自动标定,并可以提高车位状态判断的准确率。这种在线标定方法使用统计学方法对标定值的变化范围进行分析,可跟踪标定值的变化,并对其进行定期修正。文章最后用一个实际应用案例验证了该在线标定方法的可行性。
0引言
随着城市经济规模的飞速发展和市民生活水平的不断提高,城市各种车辆尤其是私家车保有量不断增长,停车场难找、车位紧张、等位耗时等问题-直困扰着公众。因此,出现了停车场诱导系统,通过地磁车位探测器检测车位状态,发布车位信息,引导公众泊车。
地磁车位探测器是采用地磁传感器监测车位在有车与无车两种状态下地磁的变化情况,实现车辆有无的判断的。如果地磁车位探测器获得的无车状态下的地磁场磁感应强度值不准确,将会出现车位状态判断错误的情况。而由于设备自身原因及自然环境影响,在无车状态下,地磁传感器检测的磁感应强度会发生变化,因此需要定期对地磁车位探测器在无车状态下的磁感应强度值进行标定。
本文研究了地磁车位探测器的标定值(即在无车状态下的磁感应强度值)的变化特点,根据其特点设计了一种地磁车位探测器的在线标定方法,实现地磁车位探测器的在线自动标定,使其标定值更加准确,以提高车位状态判断的准确率。
1标定值变化统计分析
笔者以一个停车场的35个地磁车位探测器为研究对象,对地磁车位探测器的标定值进行了统计分析。第一种是以5个月为阶段,分析节点各月间的变化:第二是以4周为阶段,分析节点标定值每周的变化;第三是以4周为阶断,针对部分典型节点分析每日的变化。
1.1月度变化在5个月的时间内,观测到节点标定值均呈下降趋势,计算平均每月的变化值及其累计分布,可得节点的月度变化值最大为-18,最小为-1,变化值在[-10,-1]间的节点占94.29%。
1.2每周变化对15个地磁车位探测器进行标定值每周变化分析,相邻两周的标定值的差值按从小到大排列,其散点图如图1所示,其纵坐标代表差值,横坐标为序号。差值区间分布如表1所列。
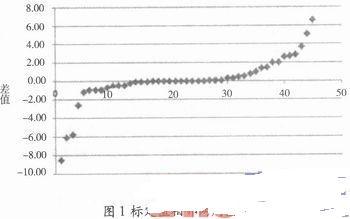

由以上分析可得,相邻两周的差值变化主要集中在[-2,2],占77.78%;在[-3,3]范围内占86.67%。
1.3每日变化对部分节点在4周内的标定值和每日变化值进行分析,可以发现:(1)相邻两天内的标定值变化未呈现明显的规律性;不同节点的每天变化值大小不同。
(2)相邻两天的变化值所占百分比如图2所示,变化值在[-3,3]区间的比率为90.84%,在[-4,4]区间占94.66%。

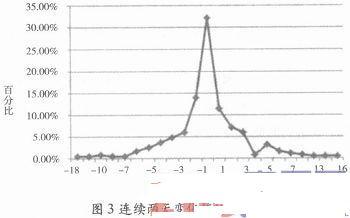
(3)连续两天出现同一方向大幅度变动的情况很少,连续两天变化值的百分比如图3所示,连续两天变化值在[-6,6]范围内的比率为94.44%。
(4)对于日变化值大的节点,在车位空闲情况下,可观测到当天标定值逐渐下降。
1.4标定值变化分析通过前面的分析,可得到如下结论:(1)长时间内,标定值具有下降趋势;相邻两月的变化值大多数在[-10,10]范围内,占91.67%。
(2)每周标定值的变化主要集中在[-2,2],占77.78%;在[-3,3]范围内占86.67%;在[-6,6]范围内占93.33%,在[-19,9]范围内达到100%。
(3)短时间内,如相邻两天内,标定值变化不定,上下振荡。相邻两天的变化值在[-2,2]间的比率为83.97%,[-3,3]间占90.84%,[-4,4]间占94.66%,[-5,5]间占96.56%。
(4)连续两天出现同一方向大幅度变动的情况很少,连续两天变化值在[-4,4]范围内的百分比(即两天的变化幅度在4以内)为85.71%,在[-6,6]范围内的百分比(即两天内变化幅度在6以内)为94.44%。
(5)对于日变化量较大的节点,若车位空闲,可观测到标定值逐渐下降。
2基于统计分析的地磁车位探测器
在线标定方法基于上述标定值分析,本文提出了一种基于统计分析的地磁车位探测器在线标定方法。该在线标定方法中涉及到的设备包括地磁车位探测器、传输网络和数据中心。其中,地磁车位探测器用于检测地磁的磁感应强度值,并将其经传输网络传送给数据中心。数据中心对数据进行分析,得出无车时的磁感应强度值,并将其作为标定值,同时将该值经传输网络发送给地磁车位探测器存储。
地磁车位探测器在线标定方法一般由三部分组成:第一,设置标定值的计算周期,假设为m小时。
第二,对地磁车位探测器检测的磁感应强度值进行统计分析,步骤如下:(1)地磁车位探测器定期采集当前车位的地磁场磁感应强度值,并将该值和采集时间发送至数据中心;(2)通过