典型高效视力检测系统设计
为了满足人们日益发展的视办检测需求,使用SPCE3200微控制芯片,外部扩展TFT-LCD模块和键盘输入模块,设计出一种基于测试人员自主检测的视力检测系统。该系统的设计旨在为视力的自主检测提供方便可靠的帮助。经实际测试结果表明,该系统简单高效特点鲜明,测试者个人即可独立完成视力检测的全部步骤,避免了舞弊和人为失误的情况发生。
人通过感官接受外界环境所表达的信息,并根据所得到的信息做出相应的反应,其中人们所最常使用的就是视觉。我们常说的视力指的是人眼对影像的分辨能力,比较经典的解释是指人眼鉴别两点是否分开的能力,视力的好坏是由视网膜分辨影像能力的大小来判定。通常来说,为了给医师判断视力提供帮助,在医学临床上会使用视力检测的数值来对视力进行评估从而对视力好坏做出判断。
在我国视力检测的方法多种多样,但归结起来可分为以下2种:1)较为传统的方式,即一测试人、一医师、一根指示杆、一视力表。测试人在医师的引领下,分辨指出指示杆所指示的视力表上视标的方向。2)由传统方式进化演变而来,利用当今先进的电子投影设备,采用先进的图形影像技术,代替传统意义上的视力表,将检测所需的图像更加清晰的呈现给被测试人员完成视力检测过程。但是上述介绍的检测方法,都有固定的缺陷,因为无论在哪种检测的全过程中,均需要一名医师进行协助工作,这样就会造成多种后果。1)需要对验光人员进行相关的培训并进行考核,费时费力;2)在大规模体检中,不可避免会因为医师的不经意甚至偏袒舞弊情况而造成的失误,这将对测试结果的公平性造成不良影响。
为克服以上缺陷,有人提出了一种全新的检测方法,即视力的自主检测。文中以视力的自主检测为研究对象,尝试设计一种"由微型计算机全程控制、单人自主即可完成测试过程的光电视力自主检测系统"。拟设计出的实验系统全部测试控制过程均在微处理器控制下完成,测试结果准确,使用控制极其方便,不会受到环境的影响。同时,在文章中对系统的工作流程进行了探究,对系统的硬秤部分相关参数进行设计,并对系统工作时所需的软件程序进行了仿真调试。
1 系统设计总路
1.1 系统所需解决问题
为了可以达到测试者在没有医师指示的情况下自主就可以完成整个视力检测过程的目的,我们希望所设计系统能够需达到如下的设计要求:
1)在实验过程中,系统要可以生成上下左右方向随机的视标给测试者进行观察;
2)当测试者对给出的视标进行了判断,系统要能对判断的结果与视标原有方向进行比对,并根据对错进行相关的体现;
3)若测试者对视标方向判断正确,则下个显示出的视标大小应比本次显示出的视标大小小一号;
4)在测试过程中若视标方向判断均正确,系统要能一直显示到码数最小的视标;
5)若测试者对视标方向判断错误,则系统能结束试验并输出上一次正确时视标对应的码数大小;
6)实验系统长时间无信号输入,可以自动结束退出。
1.2 系统工作过程设计
根据上述所述需要实验仪器系统所需达到的要求,我们对系统在一个测试周期中的工作过程进行一个详细的设置,即对一个测试者独立完成一次视力自主测试的实验工作流程进行的设计。具体工作过程如下:
1)测试开始时,首先通电,系统初始化,为视力测试做好准备;若出现错误,则进行相关提示,帮助工作人员进行解决;
2)处理器读取码数最大方向随机的图片,并显示在显示器上;
3)系统等待测试者按键,并根据其按键所对应的方向进行判断,若正确则进行步骤4,若不正确则进行步骤5;
4)系统生成比上一张测试图片码号小一号的方向随机的图片,并显示在显示器上,等待测试者进行选择,并根据其按键所对应的方向进行判断,若正确则继续循环步骤4);若错误则跳至步骤5);
5)系统显示最后一个判断正确的图片对应的标码大小,将结果输出到输出设备;
6)本次视力检测结束,系统结果清零,返回最初初始化以后的状态,断电,本次测试过程结束;
7)若实验中出现长时间无按键按下的状态(在本实验仪器中设置时间为10 s),则强制结束,从试验状态中跳出并显示对应结果。
其中,我们将系统的一个周期内工作流程简图表示如图1所示。
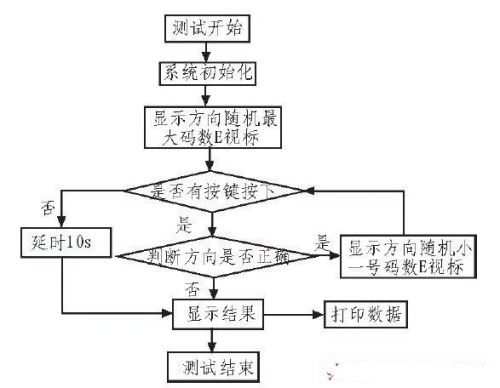
图1 系统工作简图
2 系统硬件设计
2. 1 系统硬件整体设计
为保证系统各功能的需求,我们根据系统所需完成的工作对整个硬件部分进行了功能分块处理,其中各个部分框图关系如图2所示,主要由SPCE3200主控板、TFT-LCD模块、键盘输入部分组成。其中,通过SPCE3200芯片来对TFT-LCD及键盘工作指令进行控制,TFT-LCD模块用于显示测试,而测试开始、模
- 基于SPCE3200的自主视力检测系统设计(05-25)