基于虚拟仪器的电梯上行超速保护装置检测系统
0 引言
电梯作为一种载人的起重运输设备被广泛应用于各种场所,保证电梯的安全可靠性是非常重要的。根据曳引式电梯的工作原理在电梯的运行中有超过一半的时间是对重侧重于轿厢侧,因此电梯上行超速和下行超速的事故率几乎相同,这是非常严重的。国家标准《电梯制造与安全规范》(GB7588-2003)第9、10条明确规定了在曳引驱动电梯上必须安装上行超速保护装置。作为电梯最重要的安全部件之一,主要用来解决电梯上行超速冲顶事故。因此对上行超速保护装置出厂前的检测直接关系到电梯的安全,根据该装置工作原理和结构特点提出了将检测技术和虚拟仪器技术应用到检测系统中的检测装置。该装置具有准确性、高效性、可靠性和先进性。
虚拟仪器是在以PC为核心的硬件平台上,由用户通过软件进行编程设计,设计出的虚拟仪器面板可以用来模拟仪器并实现其测量功能的一种计算机仪器系统。它充分利用了计算机系统的强大功能并且在数据处理、显示、传送、存储等方面突破了传统仪器的限制,方便了用户对系统的维护、扩展和升级等。
美国NI公司的虚拟仪器平台--LabVIEW作为一种虚拟仪器检测软件具有高效的图形化程序设计环境,它以图形化的语言为开发平台,可以实时采集检测系统的数据并且为检测系统提供友好的人机界面,是一个标准的数据采集和仪器控制软件。基于虚拟仪器的电梯上行超速保护装置的检测系统具有操作方便、自动记录和存储数据等优点,对于电梯的安全运行具有很重要的意义。
1 夹绳器工作原理
电梯的上行超速保护装置包括钢丝绳的夹持机构、触发机构和复位机构。通过图1可以清楚地看出夹绳器的工作原理和动作顺序,在电梯超速上行时,限速器会首先发出超速信号触发电磁铁失电使得机构中的钩板动作脱钩,滑动主轴在穿有的压缩弹簧的作用下解除约束并且在弹簧的作用力下沿槽滑动,同时通过拉动外侧拉杆和内侧的推动力促使两块制动板迅速靠近夹住钢丝绳。超速运行的轿厢通过钢丝绳与制动片之间产生的摩擦力将钢丝绳夹持住因此制停。复位的原理则是制动板进行与制动相反的工作远离钢丝绳,扳动复位扳手手动压缩弹簧将滑动主轴滑动至弧形槽底端达到复位。

2 虚拟仪器检测系统
检测系统主要由传感器、信号调理器和输出环节组成。如图2所示。
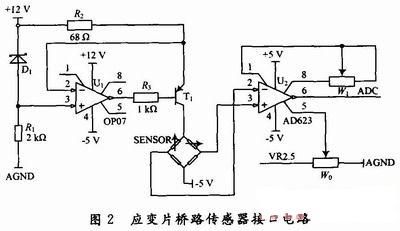
系统通过传感器直接从被测对象中取得被测量的信息,通过信号调理器这个中间转换机构将由传感器输出的信号进行放大、转换等操作,将信号转化为可以显示、记录的参量,方便对数据进行显示和打印。
该系统用于检测电梯上行超速保护装置,其中包括:摩擦片的性能即其常温下的高速摩擦系数和中温下的低速摩擦系数;电磁铁的性能即响应时间,检测电磁 铁断电响应时间就是系统检测的关键,但是无法直接测量得到,这里通过从电磁铁在断电瞬间到拉力为吸合后弹簧的弹力设计值所用的时间得到;弹簧的性能即对于弹簧主要是对自由高度、抗压性和弹性刚度的检测;整机的性能即制动摩擦力和响应速度。由以上分析可知在该系统中需要检测6个模拟量和2个开关量,属于多参数、多任务测量。
虚拟仪器系统是由仪器硬件平台和应用软件两大部分构成的。硬件平台包括计算机和I/O接口设备两部分。应用软件由应用程序和I/O接口设备驱动程序构成。在整个软件系统中融合了模块化技术、面向对象技术、多线程技术和动态链接库技术四大技术。虚拟仪器通过硬件来获取被测信号,而软件则是用来实现数据的采集、分析、处理以及显示等功能并且集成为仪器操作和运行的命令环境。
3 检测系统的硬件设计
虚拟仪器的硬件主要是获取被测信号,数据采集系统是计算机、智能仪器与外界相联系的纽带和获取信息的途径。虚拟仪器通过计算机这个核心来控制整个系统及进行数据处理。数据采集是通过一个或者多个变量获得对象信息的过程。基于虚拟仪器的数据采集系统是将选用的传感器通过配套的硬件链接到宿主计算机上,并且通过正确的软件从传感器获取数据将数据进行转换并传送给宿主计算机。
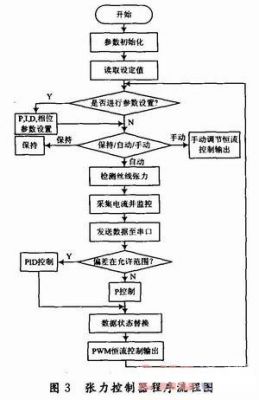
该虚拟仪器系统的硬件主要包括计算机和负责完成被测信号的采集、放大、A/D转换的I/O接口设备。硬件系统主要由多路开关、采样/保持器、放大器、A/D转换器及计算机等组成。由传感器采集的模拟信号经过采样过程将连续的信号离散化,然后将离散后的信号的幅值量化处理再进行数/模转化输入到计算机中。结构原理如图3所示的虚线框。
该系统中需要检测的参数包括6个模拟信号量和2个数字开关量,6个模拟信号量中有5个是瞬态量。考虑到系统待测信号多样性的特点和经济成本的要求,选择采用功能齐全即插即用的外置式数据采集器(DAQ)方案,选用北京瑞博华公司的AD8201数据采集器。
- 虚拟仪器:在开放架构基础上创建用户定义的测试系统(09-19)
- 什么是虚拟仪器?(10-23)
- 基于虚拟仪器技术的短波电台自动测试系统(10-23)
- 宽带多媒体网关测试方法研究(10-27)
- 采用模块化仪器,对新兴音频和视频应用进行测试(02-19)
- 基于虚拟仪器技术的航空机载电子设备自动测试系统(03-03)