地海杂波测试控制平台的设计
电机驱动(配套驱动器)的驱动方式,旋转变压器轴角传感器;12位RDC模块的轴角编码;轴角及状态参数显示采用液晶显示,专用控制计算机PC-104及配套卡。计算机采集到轴角数据并送给显示屏,通过键盘实现对天线方位,俯仰的转动控制。伺服控制系统接收中心计算机的远程控制信息以及向中心计算机传送相关的参数信息,并接收限位信息,实现对天线的限位保护。限位保护采用电限位方式,在俯仰上安装上、下限位开关,在方位上安装左、右开关,以实现对天线的限位保护。
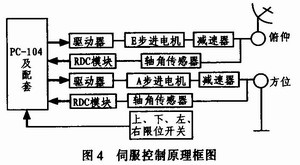
3.2 伺服控制系统实现
中心控制芯片采用单片机C8051F020,该单片机具有集成度高,功能多的优点,广泛应用于控制电路。图5所示为单片机与PC104的串行接口原理图,PC104的串行口与电平转换器接口连接,信号输入输出通过电平转换器片与单片机串口连接。为了提高系统的抗干扰性能,PC 104与单片机之间使用了高速光耦元件6N137,将CPU与通信接口隔离,防止串入式干扰。

本系统中的RDC模块采用AD2S80,可以实现10、12、14、16位4种不同的分辨率,通过SC1和SC2引脚进行选择。综合考虑转换精度和跟踪速率,本系统中选择了12位的分辨率。在工作时,旋转变压器产生的正弦和余弦信号分别接入对应的正弦输入和余弦输入引脚,转换得到的12位的数字信息直接传送给中心控制芯片。AD2S8OA及其外围电路如图6所示。

4 性能指标及工作原理
4.1 性能指标
天线转动范围为俯仰:-13°~90°,方位:±170°;天线转动方式为自动电控;波束指向精度为俯仰:±0.1°,方位:±0.1°;限位保护具有限位保护功能。接口为伺服控制计算机传送相关参数信息,该接口采用RS232串口。
4.2 工作原理
根据测定范围的要求,确定天线指向的变化,伺服控制系统的主要任务是确保天线指向的稳定性,同时通过改变天线的俯角和仰角实时的检测杂波信号。由于杂波信号的不确定性,准确稳定的确定天线的指向至关重要,因此控制系统中有两个闭环回路:俯仰控制环路和方位控制环路。
在俯仰控制环路中,引入了水平基准。水平基准对俯仰方向的倾斜角非常敏感,从而确保与俯仰轴成垂直关系,进一步提高了俯仰控制的准确性,实现俯仰指令角的定向控制。
在方位控制环路中,引入方位基准。方位基准对天线平台的方位非常敏感,从而实现方位指令角的定向控制。根据本系统的要求,伺服控制设备要具有自动定位目标范围的功能,该任务由计算机控制完成。将俯仰角和方位角输入计算机,计算机根据输入参数从而确定天线的指向。
5 指向精度分析
在系统测试过程中发现由于制作工艺,伺服系统的固有误差造成指向精度发生偏差,主要误差源及数值通过测试得出,如表1所示。

由表1可知总指向误差(均方根值):

按方位、俯仰等误差计算,得波束指向精度 。
。
通过对总指向误差,波束指向精度等相关参数的测试与计算,误差值在可控误差的范围内,系统符合使用要求。
6 结论
文中采用偏置抛物面天线,伺服控制系统设计了地海杂波测试控制平台,实现了复杂情况下,地海杂波的检测,对消除或者减小杂波的影响,提高雷达的抗干扰能力提供了依据。该平台提高了工作的时效性,它的推广应用具有较为重要的意义。
- 基于零频抑制与杂波图的地面慢速目标检测(10-22)