基于虚拟仪器的机载陀螺仪测试系统研究
统程序的编写,将各个硬件模块的驱动编译生成动态库,由测试系统程序根据需要进行调用。系统程序开发过程中,硬件驱动和虚拟仪器界面的开发是重点。
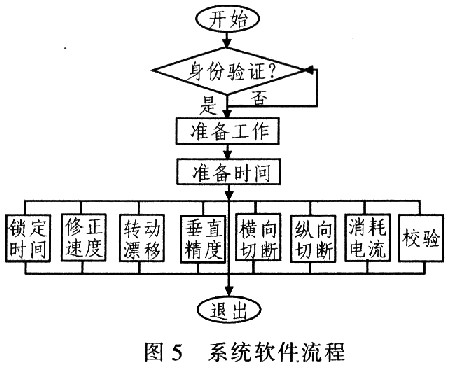
硬件驱动设计是对智能板卡进行程控,方便测试系统程序的编写和集成。航空智能板卡驱动程序是上位机与下位机程序通信的纽带,通过调用驱动函数实现计算机对硬件的控制。虚拟仪器界面提供人机接口,操作员根据需要施加信号,实时监测信号。CVI提供了开发虚拟仪器界面的用户接口资源文件(*.uir)、各种控制和显示控件,用于模拟实际仪表界面。分析完成航空电源智能采集板上位机采集功能所需的各种控件。根据CVI软件编程,完成控件的编制,除了一些基本的控制显示控件外,还有一个示波器显示控件,它用于显示采集数据的波形。机载陀螺进行检测系统软件流程如图5所示。
控制函数的编写过程中,由于在板卡功能设计中有交流和直流之分,因此在波形显示界面设计时,也将其分为交流和直流2个波形显示界面。而在运行程序过程中,采集交流或直流,都需将另外一个隐藏起来,这就用到函数SetCtrlAttribute(panelHandle,PANEL_STRIPCHAR- T,ATTR_VISIBLE,1)和函数 SetCtrlAttribute(panelHandle,PANEL_GRAPH,ATTR_VISIBLE,0)。在控制函数中,绘制波形的函数 PlotStrip Chart(panelHandle,PANEL_STRIPCHART,data,1,0,0,VAL_DOUBLE); 采用函数SetCtrlAttribute(panelHandle,PANEL_TIMER,ATTR_ ENABLED,1)打开时钟,进行数据采集。
3 应用设计
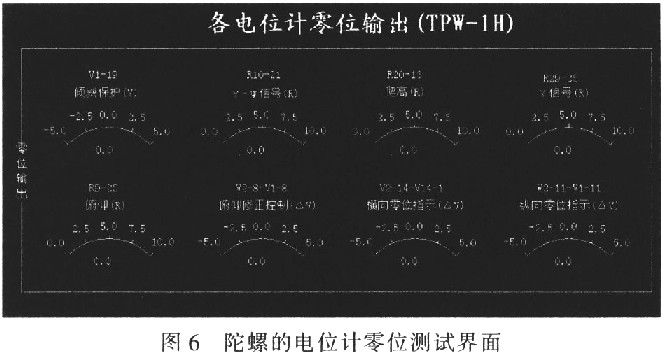
采用基于虚拟仪器技术的机载陀螺仪自动测试系统,成功构建了多套航空测试设备,例如陀螺智能综合测试设备(包括陀螺稳定平台、垂直陀螺、航向陀螺等)、操纵台智能测试仪、单相静止变换器校验设备、飞参模拟器等。机载陀螺自动测试系统检测项目:准备时间,垂直陀螺在倾斜和俯仰4°时,接通电源1 min后应以±2°的精度输出水平信号;锁定时间,当随动托架、外环架和陀螺组合件处于任何位置时,锁定时间应不超过15s;修正速度,横向修正速度 2~8(°)/min,纵向修正速度l~3(°)/min;陀螺漂移(转动),垂直陀螺以1(°)/s的角速度旋转360°后,在沿倾斜方向的漂移不大于±2.5°(实际为±3.5°)等。图6为某型号陀螺的电位计零位测试界面。
4 结论
基于虚拟仪器技术的机载陀螺仪自动测试系统利用电子电路集成技术和虚拟仪器技术的优势,以及多总线设备互补的功能,实现了对多种型号陀螺仪的自动化测试,具有测试自动化程度高、成本低、易于扩展的特点。该项技术可以应用到航空航天、测控、医疗器械等领域。
- 虚拟仪器:在开放架构基础上创建用户定义的测试系统(09-19)
- 什么是虚拟仪器?(10-23)
- 基于虚拟仪器技术的短波电台自动测试系统(10-23)
- 宽带多媒体网关测试方法研究(10-27)
- 采用模块化仪器,对新兴音频和视频应用进行测试(02-19)
- 基于虚拟仪器技术的航空机载电子设备自动测试系统(03-03)