一种新型智能清洁机器人测控系统的设计
时间:06-25
来源:钱思 熊蔡华 熊有伦
点击:
从机器人有效避障并保证尽量少的重复先前行走轨迹的角度出发,当确定了障碍物的方位和机器人离障碍物的距离后,我们希望模糊控制的输出量不仅仅是机器人动作集合中某一种动作,而是集合里某几种动作的合理组合。因此,针对不同方位的障碍物信息,对机器人左右驱动轮动作集合的7种动作 (TR,TRL,GB,SD,GA,TLL,TL)进行合理组合,即得到相应的合成输出量,记作Fi(i=1,2,3…)。根据前述方法,最终可归纳出 10种控制规则,即避障策略,如表2所示。
表2 控制规则表
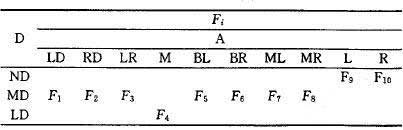
按照障碍物方位信息的查询顺序,其形式是:
if(Ai and D)then Fi
i=1,2,3…10
按照此种方法,在不影响机器人有效避障和相关功能的情况下,有效避障的控制规则大大减少,使避障算法简单化。
4 实验结果
在智能清洁机器人实验平台上对整个测控系统进行测试。实验在一间约10m2的房间中进行,在房间中随机摆放几件日常物品作为障碍物,将通过智能清洁机器人的行走实验,对本文所述的智能清洁机器人测控系统的软硬件性能进行验证。实验中,智能清洁机器人始终保持直线行走,遇到障碍物时,根据障碍物信息选择合适的避障策略避开障碍物,然后继续保持直线行走,直到遇到下一个障碍物。实验结果表明,该测控系统工作可靠,避障算法有效可行,智能清洁机器人能够自动回避障碍物,可以在无人情况下自主工作,能够实现家居环境下的智能化清扫。
5 结束语
在智能清洁机器人测控系统的进一步研究中,设计信息量更加丰富的检测系统,探讨非结构化环境下机器人的导航和自主定位技术,寻找更加有效的路径规划和避障算法,将是研究的方向和重点。
- 基于ARM单片机的装载机障碍物监测预警系统设计(04-07)
- 基于CAN总线的GaAs光电阴极制备测控系统(07-27)
- 基于虚拟仪器的平面机构创意组合实验台测控系统设计(09-29)
- 便携式低功耗雷达导航仪智能测控系统(08-22)
- 基于虚拟仪器的柴油发动机测控系统(10-04)
- 测控系统的微机化监控程序设计(02-16)