检测更小、更致命缺陷所面临的障碍
根据Kirk所说,向更高分辨率发展的速度很慢,因为如果采用20nm的像素,测量设备的操作会变得很慢和很贵。他说:"正如扫描式光刻机的开发者关注k因子一样,我们也有一个类似的因子,称之为缺陷与像素的比率。通过在像素尺寸给定的条件下找到尺寸不断变小的缺陷,我们不断地尝试着提高这个比率。为了获得更多的信息,我们必须缩小像素。这意味着更好的处理过程、更好的算法和对于给定像素的分辨率更高的光学系统--更高的数值孔径。"
另一个涉及到的问题与新材料有关。确定一个缺陷的物理起因以及其光学或电学图像是很复杂的。由于存在近场干涉效应,电介质也或多或少会吸收一些光,而且测量设备不能被设计成只针对具有特定厚度、n和k值的给定层(因为用户需要改变测量要求以针对下一个节点的器件或稍有不同的器件),因此要求不同的光学性质。光学系统的照明和检测方案都必须具有足够的灵活性,以应对可能会被采用的不同结构或材料。
在开发阶段,计量供应商必须与fab紧密合作。器件制造商不会只因为某种材料具有所需的电学性质或热管理预算就决定使用它;他们还想知道它能否被检查、测量和控制。他们在工艺开发的早期就做好相关的决定,然后请计量供应商为先进的材料和设计规则提供设备来帮助他们选择。Kirk 说:"问题在于他们可能会先选择六种不同的设备,而后来却决定只用一种,因此我们必须帮助提供所有的六种设备,并且需要在合适的时间拥有合适的测试平台。"这意味着在很早的阶段就应该为fab进行复杂的缺陷和器件建模,以保证设备具有合适的数值孔径、照明、波长、角度和采集几何结构。
粗糙度问题
亚22nm节点的缺陷检测和噪声抑制是有待解决的棘手问题。在制作栅极线条时,图形转移一般都是不完美的,而且器件的边缘都会存在一些粗糙度。芯片与芯片之间(die-to -die)或晶体管与晶体管之间不可能是完全均匀的。Kirk说:"设备将它(非均匀性造成的局部涨落)当作缺陷,而用户在其尺寸大到足以引起麻烦之前不希望它被标记出来。"问题是没有人能够先验地知道这个尺寸将是多大。在线边缘粗糙度的范畴内,可能会在沟槽底部找到一个小的基脚。这个从线条内伸出的小突刺会导致短接或泄漏;因此,必须采集来自尺寸小于20或15nm的特征结构的信号,而这些信号被掩藏在LER背底噪声的海洋内。
掩膜版设计也会引起系统缺陷。在给定的工艺窗口下,某一个特定的结构可能会在整个芯片内重复数次,而针对它的稍微强烈的光学临近修正(OPC)偶尔会失效。如果出现这种情况,Fab工程师必须知道并追踪到它的设计。他还想知道系统失效的来源,比如是不是刻蚀腔。可能存在使晶圆内的刻蚀不均匀的特殊边界条件和设置范围。系统缺陷被指出来,并确定它们是来源于掩膜版还是工艺设备;与此同时还必须找出随机缺陷,而那些无关紧要的缺陷被忽略掉。
Rudolph Technologies公司检查事业部的市场主管Rajiv Roy说:"在0.25mm节点,我们可以结合使用微观检查设备和一些宏观检查平台来解决缺陷检测和再检查问题。而在45和22nm节点,那些设备被用于检测32nm的关键缺陷。我们必须从微观检测的观点来考虑发现关键缺陷的拥有成本以获得最高的投资回报率。"
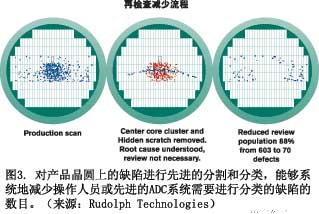
这简化了微观检查的基本原理。目前,从微观缺陷中过滤出宏观缺陷变得十分有用。宏观检查的成本已经足够低,但还需要进行再检查,这要求人们对缺陷进行观察并判断其重要性。现在,这项技术已经能够进行动态图像捕捉,再加上功能强大的判定设备,手工再检查可能会被淘汰。技术的发展使得高速、全自动的宏观检查和再检查得以实现(图3)。
Rudolph公司数据分析和再检查事业部的副总裁兼总经理Mike Plisinski指出,如何有效地将数据转化为信息仍在探索中。"我们现有的技术能够减少目前fab生产过程中产生的海量数据,并将其转化为可用的信息。"他说:"市面上总是有空间信号分析系统在出售,但是象ADC系统一样,它们从来都不能提供合适的性能和易用性来满足生产的要求。目前已经有些算法能够做到这点。我们已经成功地将用户必须再检查的数据量减少了20-30%。"
LER和线宽粗糙度(LWR)的重要性与日俱增,这就是为什么需要自动化程度更高的分类引擎的原因。可以用模数转换器(ADC)引擎来判断捕获的缺陷并将它归类;如果它属于已知的缺陷类型,那么用户就知道引起问题的原因;如果是未知的类型,用户至少知道有一个图形的形式需要检查。如果没有全自动系统,就必须进行手动再检查,这会很耗时,而且成品率的提升不会太快。
传统上,SEM不太专注于ADC。
- KLA- TENCOR 推出最新晶片边缘检测解决方案(10-13)
- Orbotech发布Symbion P36 Plus自动光学检测系统(06-13)
- 意法半导体推出一系列低端单相电表前端测量IC(06-02)
- 安森美半导体推出高质量AB类音频放大器,(10-11)
- 意法半导体推出独立看门狗IC(11-30)
- IR推出全新基准MOSFET(11-21)