相变存储器的高可靠性多值存储设计
时间:10-26
来源:电子设计应用
点击:
相关SPICE 模型和仿真结果
目前硫系化合物材料的相变物理机理至今没有完全搞清楚。 相关文献已证实,PCR 的阻值可通过晶化脉冲的个数加以控制。 这里提出一种相应的PCR 经验模型。
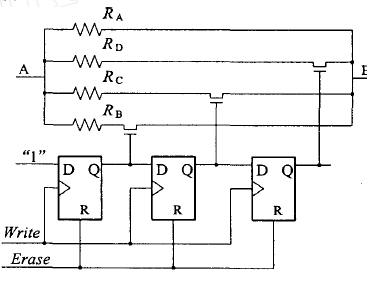
图4 具有4 态的PCR 模型
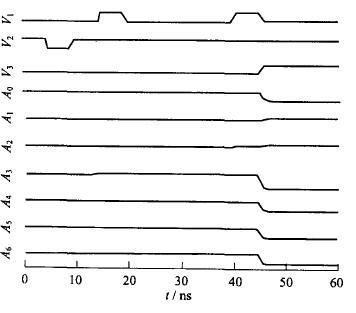
图5 编写R4/R2 ( A0~ A 6 :"0110000")
图 4 为所提出的双端(A ,B) 4 态(分别对应4 种不同阻值) 可编写的PCR 经验模型。 图中的PCR 阻值由Write脉冲的个数来控制。上面已经讨论了读操作,这里主要针对写操作过程对模型和仿真进行讨论。 在编写前,需要首先对PCR 进行擦除( Erase) 操作以确定编写的初始态。Erase 即为PCM 中的Reset 操作,将PCR 转变为高阻非晶态。 接下来的编写脉冲(Set ) 逐步降低PCR 阻值,使之从非晶状态逐渐向多晶状态转化。 图4 中,R 为D 触发器的复位端。 PCR 的4 态阻值为R1 = RA//RB//RC//RD ,R2= RA//RB//RC ,R3 = RA//RB ,R4 = RA ,(忽略MOS 选通管的导通电阻RDS) 。 在执行写操作时,激励源产生Set和Reset 脉冲。 相关电路结构可见文献中图3。 Reset 脉冲此时为擦除脉冲,将PCR 写为阻值最高的非晶态。 而Set 脉冲则不同于传统2 态存储下的情况:它并非一次性而是逐步的晶化PCR ,由此产生各种介于完全多晶态和完全非晶态之间的中间态。 具体的状态转换关系如文献中的图8 所示。
在多值存储的情况下,直接编写是不可能的(因为编写脉冲和初态有关) 。 取而代之的有2 种编写方法,先擦除后编写,或先预读再适当编写。 对于多值存储下的读操作,同样有2 种操作方法,一次性并行读出,或二分法串行读出。
图 5 是单元写为"010"的仿真结果。 着重验证全新状态定义的可行性,写操作采用"先擦除后编写"模式,读操作采用并行读出,以简化控制逻辑和时序。存储单元和外围电路基于0.35 μm 的CMOS 工艺,工作电压3.5 V(一部分外围电路的工作电压为5 V) 。 仿真采用HSPICE。编写前,选中单元中2 个PCR 均被初始化(擦除) 为R4 状态(如图2 ,R4 代表最高阻的非晶态) 。 读出时,对单元内2 个PCR 施加相同的激励电压,通过比较PCR 上的电流以确定阻值比。针对"010"的情况(其最终状态是R4/R2) ,随后的编写只针对连接偶数位线的那个PCR。 图5 中,从上到下分别是编写脉冲V 1 、擦除脉冲V 2 (初始化) 、S/A 预充电脉冲V 3 和输出比较结果A 0~ A 6 的时序波形图。 根据表1 ,初始化后,偶数位线上的2 个连续脉冲即可使该位线所接的PCR从R4 状态转化为R2 ,且比较输出结果A 0~ A 6 应该为"0110000"(对应3 位二进制输出"010") 。 仿真结果完全吻合。
优 化
读写操作的优化
写:PCM 中读操作功耗很小,且读操作比写和擦除操作快得多(尤其和晶化PCR 的SET 操作相比),因此预读后编写相对于先擦除后编写模式,在功耗和速度上均有优势。 读:PCM 中读操作速度快、低功耗的特点有利于采用二分法串行读出模式而非并行模式,且在8 态存储下其外围电路相对简单。 故采用预读的写模式和二分法串行读出模式。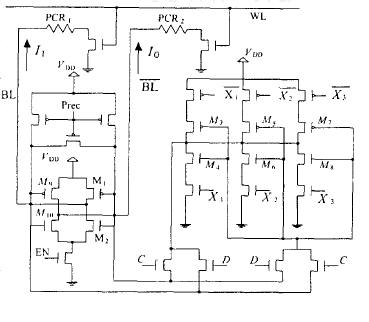
图6 可实现7 种不同比较的S/A
外围电路的优化
在二分法串行读出模式中,并行读出所需的7 个S/A 和相应的电流驱动模块由1 个可配置的S/A 代替,如图6 所示。 该S/A 可完成7 种不同的比较。 其中,M3 ,M5 ,M7 的宽长比,分别是M1 的b-a ,a-1 ,c-a倍。 而M4 ,M6 ,M8 的宽长比是M2 的b - a ,a - 1 ,c - a 倍。 合理设定控制信号X1 ,X2 ,X3 ,C 和D可以实现两股输入电流I0 和I1 的各种比较,如I0 与b 倍的I1 比较等。 采用这种S/A 后,外围的S/A 数目明显减少,有利于提高存储密度。 同时由于PCM 读操作速度相对写操作较快,串行读出对电路的速度造成的影响很小。
新型软硬结合的ECC 纠错方法
针对信息存储中可能的出错,传统方法是应用ECC 校验纠错,以Hamming 码为代表。 但这种方法所需的电路结构复杂,成本昂贵且降低了存储密度。
对PCM 而言,出错主要体现为PCR 的阻值漂移。 这里,同样基于以比值为导向的状态定义,在利用PCR 较大的动态电阻范围的基础上,提出一种软硬件结合的ECC 方法。

图7 带有DEM 功能的8 态定义及其分布情况
图 7 是带有漂移错误监测(drift errormonitoring ,DEM) 功能的状态分布图。相变材料提供的大动态电阻变化范围使得比值的一维区间在划分出多种存储状态所对应的各区间后,仍有足够的空间可供使用。这些剩余的空间可以划分成几部分而位于各个存储状态所对应的比值区间之间,称之为"禁区",如阴影所示。 即:一旦同一单元内2 个PCR的电阻比值( RO/RE ,RO ,RE 分别为奇数和偶数位线上的PCR 阻值) 落入这些禁区,就认为是发生了错误。 2T2R 单元内2 个PCR 受到外界几乎相同的干扰,而几乎相同程度的阻值漂移将使得其电阻比值基本保持不变,故而电阻阻值比难以逾越这些"禁区"而从一状态直接跳变为另一状态。因此,一旦出错,原正确状态必是"禁区"两侧紧邻的两种状态之一(而不是像传统ECC 那样,在8 种状态中判断) 。 这就大大降低了后继ECC 找错和纠错的难度,简化了外围电路,有利于高密度下的安全存储。
由于监测某一数据位是否出错的过程不依赖其他数据位,因此该方法可以实现传统方法难以实现的"全部数据位的错误监测(all-error-detection ,AED) "。 错误监测通过外围2 个如图6 所示的S/A 及相关的比较电路实现:一个S/A 使用各"禁区"的下限值(1/g ,1/e ,1/c ,1/a ,b ,d ,f ) 与阻值比进行比较:另个S/A 使用相应的上限值(1/f ,1/d ,1/c ,a ,c ,e ,g) 与阻值比进行比较。 当某一"禁区"的2 个边界值(如a 和1/a) 与阻值比相比较的结果不同时,即说明此时的阻值比已落入该禁区( a 和1/a 对应禁区[1/a ,a ]) ,则可能的原状态只可能为与该禁区紧邻的2 状态之一(禁区为[1/a ,a ] ,则可能的2 状态为R2/R1 或R1/R2) 。 后继ECC 电路再由此缩小的范围继续判断,电路复杂度将大大简化(具体电路这里略) 。 正常状态的比较结果见表2。
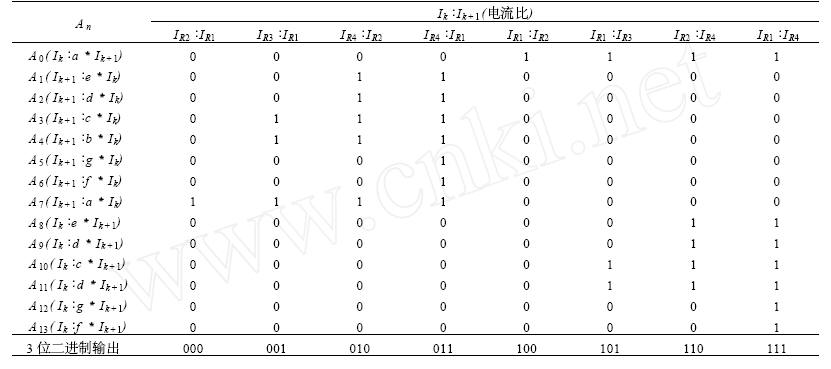
表2 带有ECC电路时的输出状态的真值表
目前硫系化合物材料的相变物理机理至今没有完全搞清楚。 相关文献已证实,PCR 的阻值可通过晶化脉冲的个数加以控制。 这里提出一种相应的PCR 经验模型。
图4 具有4 态的PCR 模型
图5 编写R4/R2 ( A0~ A 6 :"0110000")
图 4 为所提出的双端(A ,B) 4 态(分别对应4 种不同阻值) 可编写的PCR 经验模型。 图中的PCR 阻值由Write脉冲的个数来控制。上面已经讨论了读操作,这里主要针对写操作过程对模型和仿真进行讨论。 在编写前,需要首先对PCR 进行擦除( Erase) 操作以确定编写的初始态。Erase 即为PCM 中的Reset 操作,将PCR 转变为高阻非晶态。 接下来的编写脉冲(Set ) 逐步降低PCR 阻值,使之从非晶状态逐渐向多晶状态转化。 图4 中,R 为D 触发器的复位端。 PCR 的4 态阻值为R1 = RA//RB//RC//RD ,R2= RA//RB//RC ,R3 = RA//RB ,R4 = RA ,(忽略MOS 选通管的导通电阻RDS) 。 在执行写操作时,激励源产生Set和Reset 脉冲。 相关电路结构可见文献中图3。 Reset 脉冲此时为擦除脉冲,将PCR 写为阻值最高的非晶态。 而Set 脉冲则不同于传统2 态存储下的情况:它并非一次性而是逐步的晶化PCR ,由此产生各种介于完全多晶态和完全非晶态之间的中间态。 具体的状态转换关系如文献中的图8 所示。
在多值存储的情况下,直接编写是不可能的(因为编写脉冲和初态有关) 。 取而代之的有2 种编写方法,先擦除后编写,或先预读再适当编写。 对于多值存储下的读操作,同样有2 种操作方法,一次性并行读出,或二分法串行读出。
图 5 是单元写为"010"的仿真结果。 着重验证全新状态定义的可行性,写操作采用"先擦除后编写"模式,读操作采用并行读出,以简化控制逻辑和时序。存储单元和外围电路基于0.35 μm 的CMOS 工艺,工作电压3.5 V(一部分外围电路的工作电压为5 V) 。 仿真采用HSPICE。编写前,选中单元中2 个PCR 均被初始化(擦除) 为R4 状态(如图2 ,R4 代表最高阻的非晶态) 。 读出时,对单元内2 个PCR 施加相同的激励电压,通过比较PCR 上的电流以确定阻值比。针对"010"的情况(其最终状态是R4/R2) ,随后的编写只针对连接偶数位线的那个PCR。 图5 中,从上到下分别是编写脉冲V 1 、擦除脉冲V 2 (初始化) 、S/A 预充电脉冲V 3 和输出比较结果A 0~ A 6 的时序波形图。 根据表1 ,初始化后,偶数位线上的2 个连续脉冲即可使该位线所接的PCR从R4 状态转化为R2 ,且比较输出结果A 0~ A 6 应该为"0110000"(对应3 位二进制输出"010") 。 仿真结果完全吻合。
优 化
读写操作的优化
写:PCM 中读操作功耗很小,且读操作比写和擦除操作快得多(尤其和晶化PCR 的SET 操作相比),因此预读后编写相对于先擦除后编写模式,在功耗和速度上均有优势。 读:PCM 中读操作速度快、低功耗的特点有利于采用二分法串行读出模式而非并行模式,且在8 态存储下其外围电路相对简单。 故采用预读的写模式和二分法串行读出模式。
图6 可实现7 种不同比较的S/A
外围电路的优化
在二分法串行读出模式中,并行读出所需的7 个S/A 和相应的电流驱动模块由1 个可配置的S/A 代替,如图6 所示。 该S/A 可完成7 种不同的比较。 其中,M3 ,M5 ,M7 的宽长比,分别是M1 的b-a ,a-1 ,c-a倍。 而M4 ,M6 ,M8 的宽长比是M2 的b - a ,a - 1 ,c - a 倍。 合理设定控制信号X1 ,X2 ,X3 ,C 和D可以实现两股输入电流I0 和I1 的各种比较,如I0 与b 倍的I1 比较等。 采用这种S/A 后,外围的S/A 数目明显减少,有利于提高存储密度。 同时由于PCM 读操作速度相对写操作较快,串行读出对电路的速度造成的影响很小。
新型软硬结合的ECC 纠错方法
针对信息存储中可能的出错,传统方法是应用ECC 校验纠错,以Hamming 码为代表。 但这种方法所需的电路结构复杂,成本昂贵且降低了存储密度。
对PCM 而言,出错主要体现为PCR 的阻值漂移。 这里,同样基于以比值为导向的状态定义,在利用PCR 较大的动态电阻范围的基础上,提出一种软硬件结合的ECC 方法。
图7 带有DEM 功能的8 态定义及其分布情况
图 7 是带有漂移错误监测(drift errormonitoring ,DEM) 功能的状态分布图。相变材料提供的大动态电阻变化范围使得比值的一维区间在划分出多种存储状态所对应的各区间后,仍有足够的空间可供使用。这些剩余的空间可以划分成几部分而位于各个存储状态所对应的比值区间之间,称之为"禁区",如阴影所示。 即:一旦同一单元内2 个PCR的电阻比值( RO/RE ,RO ,RE 分别为奇数和偶数位线上的PCR 阻值) 落入这些禁区,就认为是发生了错误。 2T2R 单元内2 个PCR 受到外界几乎相同的干扰,而几乎相同程度的阻值漂移将使得其电阻比值基本保持不变,故而电阻阻值比难以逾越这些"禁区"而从一状态直接跳变为另一状态。因此,一旦出错,原正确状态必是"禁区"两侧紧邻的两种状态之一(而不是像传统ECC 那样,在8 种状态中判断) 。 这就大大降低了后继ECC 找错和纠错的难度,简化了外围电路,有利于高密度下的安全存储。
由于监测某一数据位是否出错的过程不依赖其他数据位,因此该方法可以实现传统方法难以实现的"全部数据位的错误监测(all-error-detection ,AED) "。 错误监测通过外围2 个如图6 所示的S/A 及相关的比较电路实现:一个S/A 使用各"禁区"的下限值(1/g ,1/e ,1/c ,1/a ,b ,d ,f ) 与阻值比进行比较:另个S/A 使用相应的上限值(1/f ,1/d ,1/c ,a ,c ,e ,g) 与阻值比进行比较。 当某一"禁区"的2 个边界值(如a 和1/a) 与阻值比相比较的结果不同时,即说明此时的阻值比已落入该禁区( a 和1/a 对应禁区[1/a ,a ]) ,则可能的原状态只可能为与该禁区紧邻的2 状态之一(禁区为[1/a ,a ] ,则可能的2 状态为R2/R1 或R1/R2) 。 后继ECC 电路再由此缩小的范围继续判断,电路复杂度将大大简化(具体电路这里略) 。 正常状态的比较结果见表2。
表2 带有ECC电路时的输出状态的真值表
- 恒忆携手三星电子,合作开发PCM(05-30)
- 数字电视条件接收卡SoC SM1658的硬件结构及实现方法(上)(09-07)
- 浅析交换机数字中继PCM故障(10-02)
- 基于DDX技术的全数字功放解决方案(09-11)
- 恒忆PCM的特征及性能(10-27)