电动汽车车载智能显示系统设计,包括源代码、原理结构图
插式封装;存储容量大,内部有512页,每一页为64字节,任一单元的地址为15位。能够满足本系统高容量数据储存的要求。
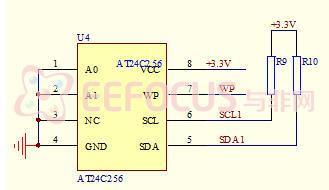
图4 数据存储及传输电路设计
图4为数据存储及传输硬件接口电路图。AT24C256存储芯片AT24C256通过I2C数据线SDA、时钟线SCL与PIC32MX相连接。可提供256K存储空间。在系统工作时,可记录电池状态历史数据及车辆运行故障历史数据。
2.4通信设计
本设计包含两种通信方式,CAN通信方式与RS485通信方式,两种通信方式为液晶屏的通信兼容提供了可能。
2.4.1 CAN通信设计
本液晶屏设计采用的主控芯片PIC32MX440F128L不带有CAN功能,因此本设计中的CAN通信采用MCP2515+ PCA82C250T且外加一个磁偶隔离芯片来实现CAN通信功能,通信波特率125Kbps,采用11位标准标志符,CAN通信网络可连接节点最多112个,可满足对110节单体电池的监控。CAN通信原理框图如图5所示:

图5 CAN通信原理框图
从电池和电机控制器发出的信息通过CAN总线送到CAN收发器,再经过转换和隔离送入CAN控制器芯片,CAN信息经过CAN控制器处理信息数据最后以SPI通讯方式传送给主控芯片PIC32MX440F128L进行数据处理。电路原理如图6所示:
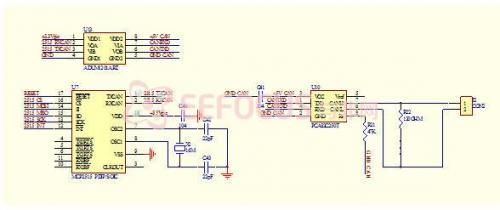
图6 CAN通行原理图
其中MCP2515是一款CAN协议控制器,完全支持CAN V2.0B技术规范,通信速率为1Mb/s。该器件主要由三个部分组成:① CAN模块,包括CAN协议引擎,验收滤波寄存器,发送和接受缓冲寄存器。②用于配置该器件及其运行的控制逻辑和寄存器。③SPI协议模块。MCP2515能发送和接收标准和扩展数据帧和远程帧。PCA82C250T是CAN收发器,支持"ISO 11898"标准,通信速率可达1Mb/s,具有很强的抗电磁干扰和抗无线干扰的能力,是双通道数字隔离器,采用了高速CMOS工艺和芯片级的变压器技术,工作电压为2.7V到5V,符合车用等级,工作温度可达到125°C。传输速率可达到25Mb/s。
2.4.2 RS485通信
液晶屏上配备有RS485通信接口,以方便液晶屏与外部进行通信。RS485是一种共模通信方式,具有较强的抗干扰能力。PIC32MX440F128L自带RS485通信接口,其输出信号送给MAX2M3425芯片,该芯片能发送、接收RS485信号,能进行半工和全双工的传输方式,具有最大1M/S的传输方式,RS485通信电路原理图如图7所示:
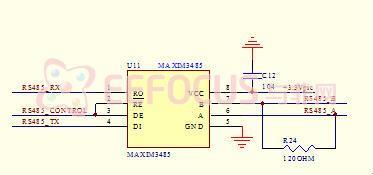
图7 RS485通信接口电路原理图
2.5 液晶屏实时时钟显示设计
本液晶屏设计时钟显示数据通过PCF8563实时时钟/日历芯片来产生。PCF8563是低功耗的CMOS实时时钟日历芯片,它提供一个可编程的实时时钟输出,一个中断输出和掉电检测器。所有的地址和数据通过I2C总线接口串行传递,最大总线速度可达到400Kbit/S。PCF8563有16个8位寄存器,一个内置32.768KHZ的振荡器,一个分频器,一个可编程的时钟输出,一个定时器,一个报警器,一个掉电检测器和一个400KHZ的I2C总线接口。电路原理图如图8所示:
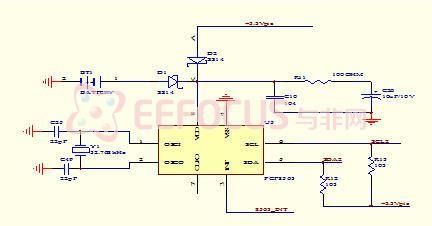
图8 日历时钟电路原理图
图8中PCF8563芯片的5、6引脚为I2C总线用的两个引脚,两个引脚必须用一个上拉电阻与正电源连接,这两个引脚与PIC32MX440F128L的I2C引脚相连实现PIC32MX440F128L与日历时钟芯片间传递数据。液晶屏工作时,PIC32MX440F128L主控芯片先通过I2C对PCF8563芯片进行初始化,设定好当前显示的年月日以及时间信息,设定完成确认后,单片机将数据传送给图形处理器芯片,最后在液晶屏上显示。如果在使用过程中想调整显示的时间,可直接在液晶屏上通过按钮修改。PIC32MX440F128L主控芯片会不断地查询液晶屏按钮动态信息,并发送相应的指令信息到PCF8563芯片修改时间。
2.6 PIC32MX与SSD1926的接口电路
SSD1926是一款中小规模的显示控制芯片。采用128引脚LQFP封装,256 KB静态存储空间和2D图像引擎,可以支持单色和彩色LCD;32位内部数据通道,可以提供高带宽的显示内存,以实现快速的屏幕刷新;采用单电源供电和单时钟输入,具有很短的CPU访问延迟时间,可以支持无READY/WAIT信号的微处理器。这些特点能够极大地简化外围电路的设计。同时,SSD1926还具有强大的总线兼容性,可与多种类型的MCU连接,除了支持SRAM接口与ARM系列连接、ISA接口与NEC系列连接外,还支持8/16位8080时序间接寻址方式,能够方便地与各种具有并口的MCU连接。本设计采用PIC32MX460F512L的8位/16位并行控制接口模块与SSD1926接口。硬件接口框图如图9所示:
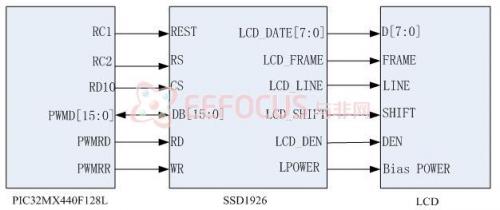
图9 PIC32MX440F128与SSD1926接口框图
CS为片选信号,RS为地址与数据选择信号,RESET为复位信号,都可以由通用I/O口进行控制,分别用RD10、RC2和RC1与其连接。数据总线DB[15:0]与并行控制接口模块中的PMD[15:0]引脚分
- 电动汽车:颠覆性的快速充电与非接触充电技术(09-20)
- 电动汽车的基本概述及重要组成(10-28)
- 矢量控制变频器在混合动力电动汽车中的应用(01-27)
- 基于CAN总线的电动汽车控制系统设计(05-25)
- 电动汽车驱动系统中的超级电容原理(05-21)
- 动力电池管理系统硬件设计技术(05-30)