基于S3C2410的网络式汽车防盗系统
利用加速度传感器对车体振动与倾斜进行监测
对车体的振动与倾斜状况进行测量,可以对窃贼采用拖吊法盗窃车辆以及破坏车体的现象进行预警。由于加速度传感器ADXL202E能够测量0~5kHz、士2g范围内的动态或静态加速度:动态加速度的测量可以用于振动检测,利用静态的重力加速度作为输入矢量,就可以确定物体的空间方向。因此可以利用ADXL202E同时对车体的振动和倾斜角度进行监测。
利用霍尔开关器件对车门的开关进行监测
A3210E是霍尔效应开关器件。采用数字信号输出,在南、北磁极的作用下均能产生霍尔效应:磁极靠近时,开关打开,输出电平为低;磁极远离时,开关关闭,输出电平为高。该类传感器的功耗非常低,如A3209E的功耗低达400mW,特别适合低功耗应用。
霍尔器件组的设计是将多个霍尔器件分布在汽车的4个车门,将车门打开时,霍尔器件会发出微弱的电信号,然后将每个开关器件的输出信号送至器件组的局部决策中心进行融合,这里将4个车门的警报等级看作相同,可以直接采用硬件进行"或"
运算,得到融合结果送至中央处理模块。
设计中的关键技术操作系统
Linux内核的配置
配置Linux内核的步骤如下:
首先,进入系统的源代码目录/Linux-2.4.18,运行menuconfig命令,系统就自动进入配置界面。界面很直观,这里,需要分别对串口、网卡和摄像头进行配置。
1.网卡和串口的配置
内核映像的下载需要用到串口和网卡,必须对串口和网卡驱动进行修改,以保证能够顺利完成移植工作。为了使内核支持串口,在进行内核配置时,对串口必须要有以下的配置选项:
[*] ARM AMBA PLOT! serial port support
[*]Support for console on AMBA serial port
对网卡必须要有以下的内核配置选项:
*)Ethernet (10 or 100M)
Generic Media independent Interface device support
[*]SMC 91C9x/91Clxxx support
串口驱动程序位于源码树的///drivers/serial/amba.c,网卡驱动程序位于linux/drivers/net/ann/smc9lx.c和linux/drivers/net/arm/smc9lx.h.网卡的Memory map要比串口的简单。
2. USB系统的配置
要启用USB系统,首先进入USB support一节并启用Support for USB选项(对应模块为usbcore.o)。接着,需要选择USB主控制器驱动程序。选项是EHCI(对应模块为ehci-hcd.o)、UHCI(对应模块为usb-uhci.o)和OHCI(对应模块为usb-ohci.o )。
每块支持插入USB设备的主板都需要有USB主机控制器芯片。这个特别的芯片与插入系统的USB设备进行交互操作,并负责处理允许USB设备与系统其他部分通信所必需的所有低层次细节。
启用了USB support和USB主机控制器驱动程序后,接下来应该启用Preliminary USB devicefilesystem,然后启用USB外围设备的驱动程序。例如,为了启用对USB摄像头的支持,应该启用USB Camera support.
一旦用新的内核重新引导后,目录//proclbus/usb下应该有相应的USB设备信息。如若没有信息,应输入以下命令,将USB设备文件手动挂装到//proc/bus/usb.
#mount-t usbdevfs none /proc/bus/usb
3.摄像头
本车载终端使用cam301p摄像头,所以,在配制Linux系统内核时要选择cam301p这一项。
Multimedia devices-->
Video For Linux
Video For Linux-->
[*]V4L information in proc filesystem
USB support-->
USB cam301p Camera support
编译新内核
配置好内核后,进入//usr/src/linux-2.4.18目录下执行以下步骤:
1. $make dep,以正确设置所有的依赖关系。
2. $make clean,清除所有己存在的目标文件。如果忘记做这一步,生成的内核将会非常庞大。
3. $make zImage,生成一个经过压缩的内核。
4.运行make modules和make modules_install.
5. make install.
一旦为目标系统编译了内核,通过使用引导装载程序(bootloader),内核就被装入到目标系统的内存。通过使用串口,引导装载程序与主机通信,将内核传送到目标机的DRAM中。将内核完全装入目标机后,引导装载程序将控制权交给内核。
图像报警技术
图像报警是系统的关键技术,也是系统的难点,通过对监视图像的分析和控制,实现报警和警情处理。该技术中融合了传感器、数字化处理、摄像与图像处理技术。报警流程图如图2所示。
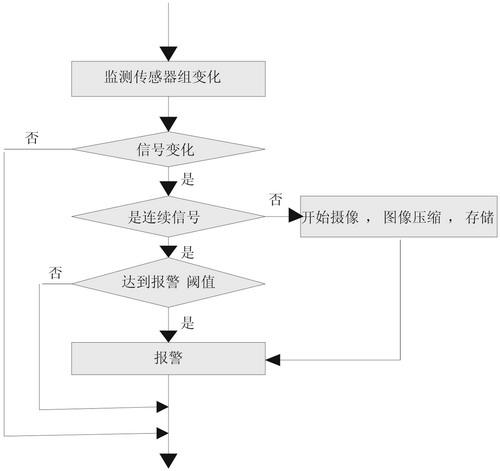
图2报警流程图
由于传感器是一种微弱信号检测设备,很容易受外界因素的影响而导致误报警,有些通过用户的努力是可以避免的;有些从原理上讲是不可以避免的,如小动物和电磁波干扰引起的误报警。为了尽量降低误报
S3C2410 传感器 汽车防盗 ZR36060 ADXL202E 相关文章:
- 基于ARM的GSM远程监控系统(06-08)
- 基于ARM9-Linux平台的车载导航系统设计(04-07)
- 基于Linux/Qtopia的车载温度网络采集技术(11-29)
- 基于Linux/Qtopia的车载温度网络采集(05-10)
- 基于SLE4442加密存储卡的汽车行驶记录仪中驾驶员身份识别系统设计(11-19)
- 另类传感器观念:汽车传感器(2)(11-30)