机器人设计开发中的三大挑战
boTIcs Business Review中的一篇文章中描述了一项被称为RoboSwift的项目,它模仿了雨燕或燕子的行为方式,降低了被探测到的可能性,并优化了在城市区域中的机动性。RoboSwift的翅膀甚至拥有可变后掠翼,使飞行机器人能够改变翼的几何形状从而达到最佳的转弯半径。此类设计同样需要执行机构的创新。
NI正努力使电机控制和接口设计更简单。从电机驱动(如NI 9505和最近发布的NI 951x系列CompactRIO驱动接口模块)到 LabVIEW 2009 NI SoftMotion Module中直观的运动控制功能,再到LabVIEW中基于FPGA的CAN通信电机控制范例(ni.com/ipnet)、以及简单数字控制(如PWM),我们不断使执行机构的控制更加简单、高效、灵活。
工业级的机器人软件
专家认为的最大的挑战也是令我最激动的一项挑战:机器人研发人员需要功能强大的软件来设计他们的自主系统--不是专门针对特定机器人或任务的软件,而是不但对现有算法开放且能够解决当前也许还不知道的问题。这将是我认为最快获得解决的挑战。随着你们及其他世界领先的软件开发人员的努力,我们能够让设计人员在2010年获得功能更强大的软件包。目前最大的阻力是大家的惯性思维。许多公司正投资于错误的方法。法国巴黎Aldebaran Robotics公司的 AnneMarie Bourcier的话最近被Slashdot.org引述,他说"任何事情立即从头设计都是相对简单的。"
这是最近数十年来机器人领域的观念,也正是我们没有看到产品被广泛采用和改进的原因。我们希望看到一些技术的趋同,并通过我们的创新能力使机器人产生其应有的影响力。因而,机器人领域需要标准的、工业级的软件。
1. 该软件必须是直观式的.
许多机器人研发人员都拥有机械工程或电子工程学的背景,但没有时间或资金去学习最有用的计算机技术中的重要细节,然而他们却需要从这些技术中获得帮助。编程能力,如面向对象编程和递归在机器人自动控制系统中是至关重要的,所以他们需要一款具有这些特性的编程语言。此外,用户界面必须直观灵活。通常自主系统的终端用户是营救人员(如消防员)、士兵或老年人,无论是谁都很难面对一个复杂、难以理解的用户界面来完成他们的任务。
2. 软件必须具备与I/O的良好集成性.
每个自主系统都必须感知或察觉周围世界的环境并做出反应。传感需要外部传感器如激光测距仪及声纳传感器,做出反应则需要具有驱动不同类型执行机构的能力。除了感知系统、决策规划和执行控制以外,软件工具还必须在真实硬件上轻松实现应用,这意味着软件必须具有与实时系统、实时嵌入式硬件、甚至FPGA 的强大交互性。许多软件包,包括市场上的Microsoft Robotics Studio缺乏这种功能,它们能够仿真并在开发机器上运行,但不具备实时硬件实现的能力。
3. 软件必须是开放的灵活的.
许多自主算法都已进行过最优化并可重用,但许多算法随已完成但往往需要扩展功能。举例来说,许多系统初始采用基本的搜索算法,如A* 至D*。许多机器人研发人员希望从这些基本算法开始,并在此基础上添加他们的创新或最新研究成果,从而创建新型的搜索算法,或将它们与新的地图技术集成从而用于机器人救援或医疗辅助应用。当前许多机器人软件包的封闭特性让设计工程师难以入手。像iRobot Aware等软件包可用于他们的机器人,但不能用于自定义或独特的机器人设计。
4. 软件必须具备良好的交互性.
创新机器人设计并不简单,它需要许多反复修改和原型设计。设计机器人所用的软件应能够适应这种情况。机器人研发人员需要一款可以轻松调试的软件包,既可以进行直观的仿真又能在实时硬件系统上快速实现,从而测试算法和真实I/O。接下来有可能还要再回到开发环境,对同样的代码进行进一步优化或软件调整。
开发中的软件
NI产品开发组正努力应对这些挑战,并为自主系统开发提供直观的、集成I/O的、开放的、灵活的、交互式的软件环境。我们拥有一个由具有数十年软件设计经验的专家组成的团队,研发了新版的LabVIEW软件应对上述需要。事实上Barrett博士宣称LabVIEW正是工业界所需的软件,称其"能够处理各类传感器、多种执行机构、复杂动态控制算法,并能轻松在实时环境下实现系统。"
我们的设计团队也在LabVIEW机器人模块中添加了许多新功能,包括集成机器人专用的传感器和执行机构、避障、搜索及运动学算法,以及新的可视化能力。我们深信创造机器人无需机器人专业的博士学位。你可以从功能强大的设计工具中获益,从容地开发高端机器人。
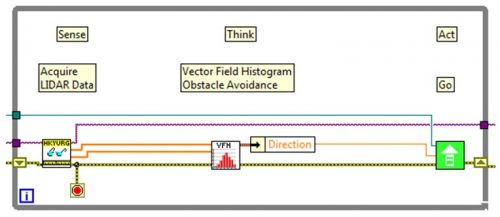
图4. 机器人软件设计无需非常复杂。图中简单的LabVIEW框图通过直观、良好可读性的编程提供了LIDAR传感、障碍物回避决策、以及刹车制动功能。
- 虚拟仪器将走向何方?(01-28)
- NI正式推出LabVIEW SignalExpress软件 (02-13)
- NI与ARM公司共同发布了应用于ARM微处理器上的NI LabVIEW嵌入式模块(05-17)
- 大联大世平集团推出高精度运动控制系统解决方案(09-16)
- 雅特生科技推出适用于列车控制系统和信号系统的ControlSafeTM 小型车载系统平台(08-22)
- 智能照明还能折腾出什么花样(10-25)