从研发到产线量产,ADAS产品要经历哪些测试?
这样一个单方向仿真过程中,前向常见的是仿真AEB、ACC,当然也包括一些其他场景。我们现在仪器距离上可以做到4到250米,移动分辨率做到0.1米。
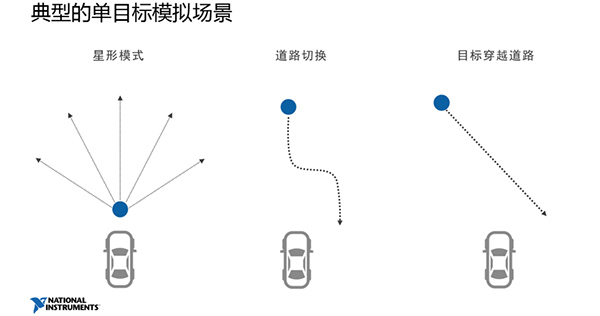
上图是在单目标模拟场景下的一些常见的场景。包括在任意方向上的接近、道路切换以及目标穿越道路。这些都是把单点的模拟场景通过软件的方法连续起来,就可以成为一个单目标的场景仿真。
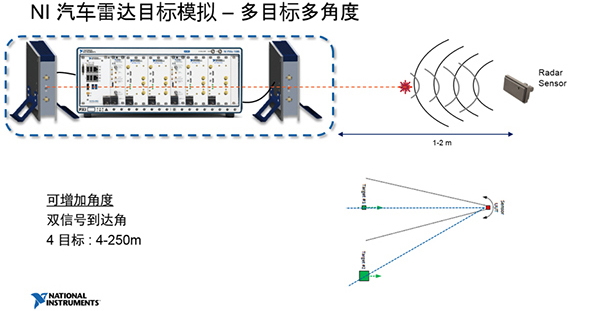
相对单目标,我们就会讲到多目标多角度,角度其实是这里边的核心概念。仿真器上如果叠加一个额外的基带模块,加外围的一个射频前端,可以在一个仪器上实现两个方向对象的目标模拟。
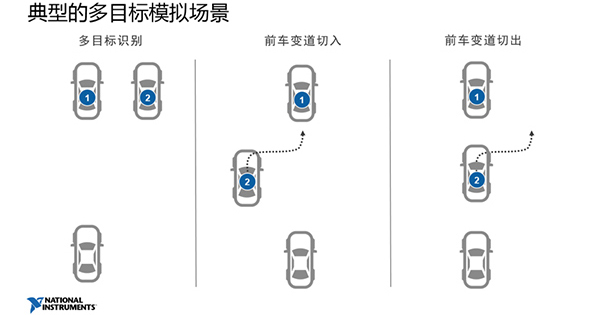
这一页就比较形象地解释了在什么样的场景下,需要两个角度以上的雷达目标模拟器。比如在跟车的情况下需要识别不同车道上的两辆车,或者在跟车行驶过程中需要仿真第三辆车Cut In或Cut Out的场景,这时我们都会同时在雷达的两个直线方向上产生不同的目标。
这也就解释了为什么我们会把雷达的模拟射频前端放置在仪器之外。由于射频前端本身的尺寸比较小,在这种多目标的仿真场景下,射频前端就可以安装在一个可以移动的平台或机械臂上,通过设备带动一个横向运动,加上仪器本身速度和距离的仿真,实现多维度的对象仿真。
机器视觉和雷达协同工作时的测试
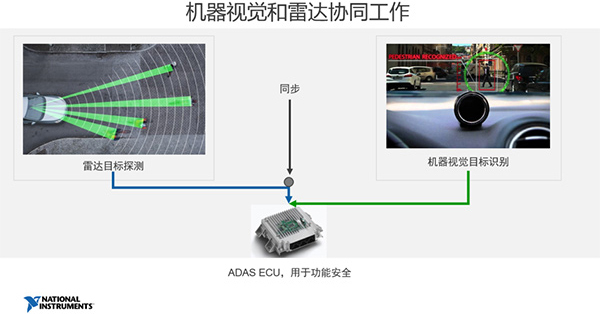
刚才这部分的是对雷达的仿真和测试功能的介绍。讲到了雷达,讲到了IPG和PreScan,我们自然而然就想到了是否可以将机器视觉和雷达进行协同工作,答案当然也是可以的。

融合机器视觉和雷达两种传感器,是现在主流的ADAS避撞方法。我们的案例可以将机器视觉摄像头通过TASS主机,或者是直接连接到我们的主机,将视频和雷达仿真连接到一起,并且两者之间实现同步,模拟一个真实路况场景中多种传感器所采集到的一个道路信号。
V2X测试
相机之外智能互联的另外一个话题就是车辆通讯。
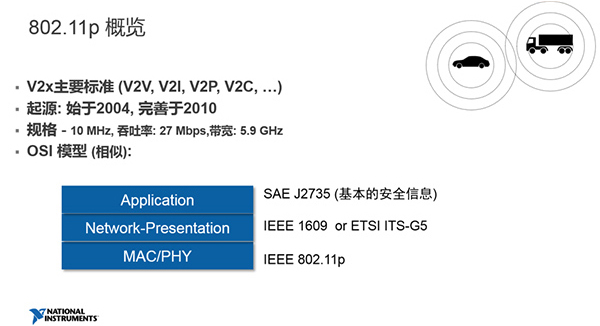
由于国内LTE-V的标准还在制定过程中,我们现有的车联通讯的方案主要集中于802.11p这样一个协议。
这里包含实现部分车联通讯的应用,包括SAE J2735里面所谓的基本安全信息发送。我们在车联通讯的常见场景就是通过协议,在汽车行驶的过程中,不断地向周围车辆发送自己的车辆安全信息。
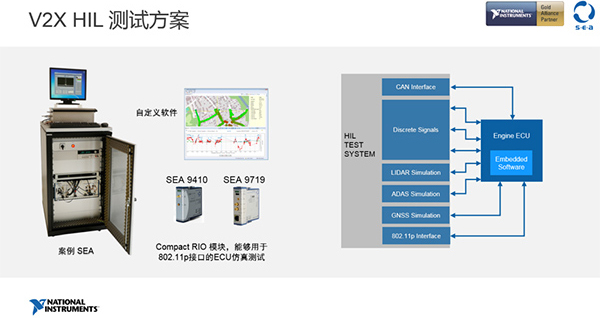
我们现在能够做到的是提供基于802.11p收发接收模块,以及具有标准测试功能的一些解决方案。对于收发模块,它既可以仿真一个车辆节点也可以仿真一个路测设备,用来与真实的车辆和路测设备进行上下链路的车联通信数据交互。从而和我们汽车上的其他传感器,包括雷达、相机、激光传感器和GPS定位这些信号的进行互联。
传感器融合的测试
从雷达讲到相机,讲到互联汽车。那自然而然就会涉及到下一个话题——传感器融合。
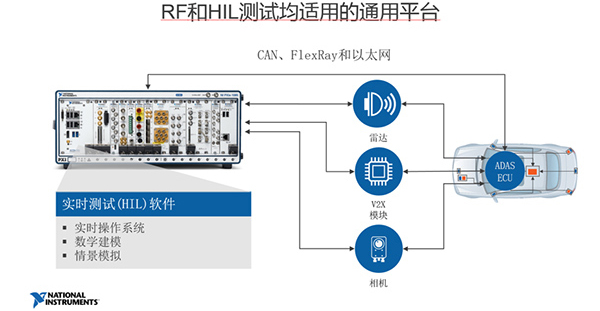
融合也是目前来讲,ADAS技术的一个主流方向,第一个层面的融合是在ADAS ECU进行的。我们刚才介绍这些方案里可以看到,现在已经能够从技术上实现雷达、相机、V2X仿真信号的发生、传递以及同步在相同的平台上进行实现。
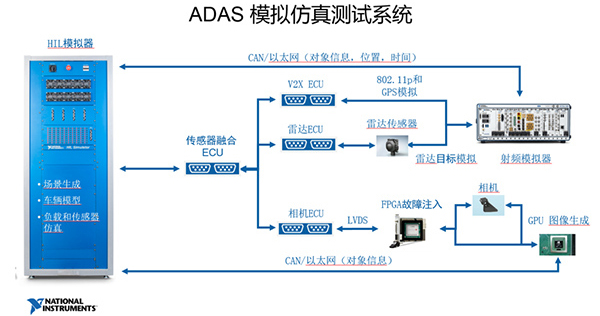
进一步来讲融合,当汽车的ADAS ECU接收到这些信号,传递到真实的汽车制动控制单元以后。这辆车是否真正能够在期待的距离之间实现制动,或者实现自动驾驶的变道来避免事故的发生。这里其实会涉及到ADAS感知系统之外的整车动力学模型,也就是添加整车动力学模型的硬件在环。
在ADAS ECU融合之后,我们还可以将包括车辆的悬架刚度,轮胎摩擦系数、整车的备重以及路面的信息和天气的信息,都加载到一个硬件在环的整车动力学模型仿真器上。
这个仿真器还会通过CAN/LIN和之前的ADAS ECU进行数据交换,从而实现从ADAS到车辆动力学模型的整体仿真。
- 基于NI PXI平台的模块化电子战模拟系统(09-25)
- WLAN测试的5要素及提升测试速度的方法(03-10)
- 了解RF仪器规格:第一部(07-24)
- 选用示波器所需考虑的10大要素(07-24)
- EDA环境结合测量软件 大幅缩短电子产品开发周期(12-12)
- 如何使用USRP-2921监测宽带频谱(09-23)