从研发到产线量产,ADAS产品要经历哪些测试?

如果从测试的类型上来看,从实验室到产线测试,一个电控模块会包含表征测试、系统验证测试、软硬件在环测试、路测和产线下线测试这样几个不同阶段。
为什么仪表厂商、特别是射频仪表的厂商会越来越多地进入到自动驾驶这个话题中来?我们今天看到的这个自动驾驶带来的技术变革,其实十分类似十多年前手机从传统手机转变为智能手机的那次变革。智能网联汽车给传统意义上机械为主的交通工具带来很多新的技术,最明显的就是汽车会越来越多的用到感知和通信技术。比如说蓝牙、雷达、无线通讯。这些技术其实使得整个汽车载电子系统的复杂度上大大的提升。
这种复杂度的提升体现在电子传感器和模块数量的不断增多,也就是我们讲的硬件复杂性。其次是在识别和电控的系统算法的代码也会不断增多,也就是我们讲的软件的复杂性。
无论是硬件还是软件的复杂性,在质量控制流程中,这就映射到"相应的硬件和软件测试验证能力的建设"这个话题上来。
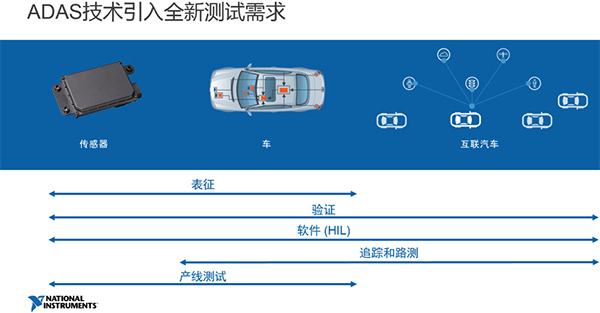
在这次分享之前,我们收到一个线下的问题:ADAS产品从研发到产线量产,这个过程中要经历哪些测试?这张图刚好回答了这个问题。
如果从测试的类型上来看,从实验室到产线测试,一个电控模块会包含表征测试、系统验证测试、软硬件在环测试、路测和产线下线测试这样几个不同阶段。

在今天的介绍中,我们会重点介绍一些雷达模组的功能测试方案,然后在这个基础上引入一些场景模拟的测试技术。之后我们会讲到雷达加相机加激光传感器和整车动力学模型的融合测试方案。此外,我们也会提及一些汽车互联通信的测试工具。
雷达模组的功能测试方案
目前常见的汽车雷达有24GHz和77GHz两个频段。现在出货量最大的几个欧美国际雷达厂商中,除了海拉还在主推后向的24GHz产品之外,其他几家基本上主推的都是77GHz的产品。

这主要是由于77GHz的技术在模块尺寸、角度分辨率和高带宽带来的高距离分辨率等方面都有先天的优势。也因为这个原因,77GHz 已经被公认是未来汽车雷达的主流发展方向。当然在中国由于成本的原因,还能看到有大量的24GHz雷达在市场上。包括一些在非汽车的领域中。
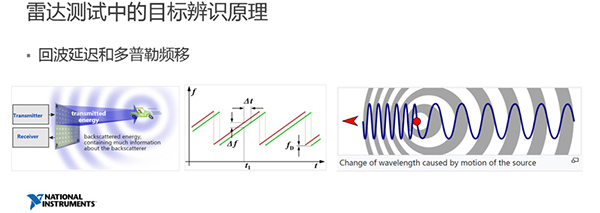
我简单的回顾一下雷达目标识别的基本原理。
和所有的主动雷达一样,汽车雷达是通过发射波束,然后接收回波来探测目标位置和距离信息的。目前常见的汽车雷达调制方式是调频连续波,也简称FMCW。雷达波是通过判别自己接收的目标反射波和自己发射波之间的时间差,然后通过波速来反推目标的位置。同时通过反射波和发出波之间的频偏,来判断检测的目标是接近还是远离,并且它的速度如何。这也就是多普勒频移的原理。
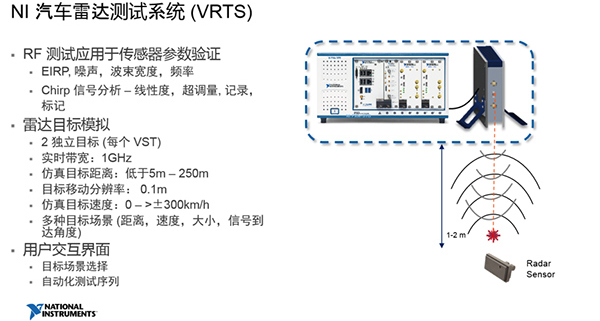
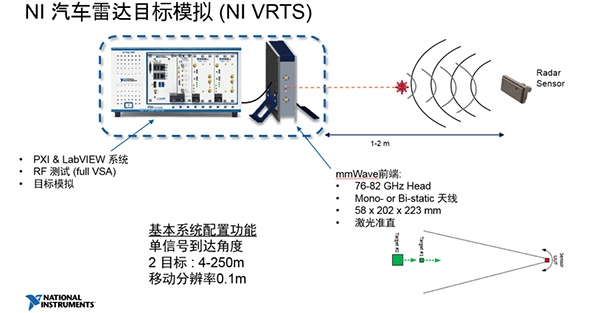
NI提供的雷达测试系统也是通过这个原理来进行仿真的。这个系统的构成见上图,包括一个3U PXI的系统主机,主机里包含的是控制模块和6G以下信号单元。主机外有一个毫米波的射频前端,后面我们会介绍为什么要把这个前端要放在主机之外。
毫米波的前端会接收雷达发射机发射的波形,然后根据用户在系统中设置的希望模拟的目标状态(包括距离和位置信息)在波形上叠加延迟和频移,然后发还给雷达接收机,从而让雷达误认为探测到了一个真实移动目标物体。
与业内其它雷达对象模拟器非常不同的一点就是,我们现在这套系统除了目标模拟功能,也包含了发射机的测试功能。也就说,这个系统其实还集成了另外一个射频分析仪,能够检测雷达天线以及雷达功率频谱和时域上的一些特性。这是一个把测试和仿真结合在一起的系统。
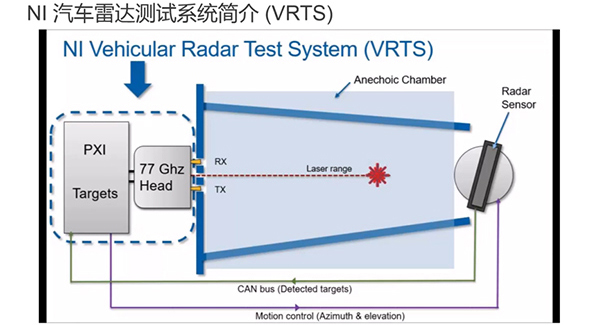
这个是一个更完整的实验室测试系统搭建的示意图。左侧虚线标出的地方是我们上一张演讲PPT中所包含的仪器系统。图片中间的蓝色部分是一个微波暗室。右侧长方形盒子是示意的雷达传感器。这个雷达传感器被安装在一个可以水平和垂直自由运动的转台上。
这样设置首先是为了满足雷达的测量功能。一般来讲,要做雷达的验证首先要测量雷达的一些参数,包含雷达的天线方向特性。在功率上,我们需要测试EIRP。在频谱上,会检测雷达发射机发射信号所占的带宽、波形宽度以及噪声。时域上,也会把雷达信号进行解调,然后看信号的调制时间、调制宽度,以及调制信号的线性度。
除了刚才讲到的附加测试功能,其实设备本身是一个雷达目标的仿真器。在目标仿真中,我们不得不说单角度和多角度的区别。
由于任何雷达仿真器都是通过一个射频天线来收发雷达信号的,所以理论上来讲,无论这个设备能仿真多少目标,这些目标都只能限定在雷达天线和仿真器天线两点之间的连线上。
简单来讲,由于任何的雷达仿真都是点源,只能仿真被测件和仿真器连线上接近的物体,这就是我们所讲的单方向。在
- 基于NI PXI平台的模块化电子战模拟系统(09-25)
- WLAN测试的5要素及提升测试速度的方法(03-10)
- 了解RF仪器规格:第一部(07-24)
- 选用示波器所需考虑的10大要素(07-24)
- EDA环境结合测量软件 大幅缩短电子产品开发周期(12-12)
- 如何使用USRP-2921监测宽带频谱(09-23)