史上最经典电动自行车控制器设计方案
电流采样时间点很重要。因为使用PWM脉冲驱动,这种脉冲驱动导致的直接结果是放大后的电流信号与PWM脉冲频率相同,相位上滞后一定时间的脉动电流波形,这种波形如果没有经过滤波处理,将会类似于一个梯形,如果我们要获得准确的电流AD转换值,最好的办法就是在梯形波的上边中间采样电流信号,这样所获得的电流AD值才能较为准确地反应电流的实际大小。在SH79F081中AD转换的采样由ADCON中的GO/DONE启动,完成一次ADC转换分为采样和保持两段时间,采样时间内,外部仿真输入信号将ADC内部采样电容充满,保持时间内,IC内部逐次比较得出A/D结果。在应用中ADC采样的时间一般为2μS,而转换时间为12μS. AD采样启动与PWM中断同步,进入PWM中断处理城市后,先执行一些PWM事件的处理,然后开启AD采样,这样采样点刚好落在电流梯形波的上边,即使由于PWM占空比很小时,开启时间小于一次ADC转换时间也没有影响,只要保证大于采样时间即2μS即可,转换时间内即使外部输入仿真量变化了也不会影响ADC转换结果。
这样采样出来的结果实际上是PWM有效期间(为高)时的电流,电流控制实际是控制平均电流。(FLT短路保护是控制瞬态电流)。因此需要乘上PWM占空比得到平均电流,因为理论上,PWM周期内无效(低电平)期间主回路上是没有电流的。
根据电流采样的结果来实时调整PWM的占空比,实现电流闭环,理论上电流闭环的时间常数可以做到一个PWM周期时间(60us左右)。
4.4.同步整流
电机是电感性负载,采用PWM开关驱动,在功率管关断期间由于电流不能突变,必须要有续流回路,功率MOSFET一般内置有续流二极管,但是续流二极管压降在1V左右,而电动车工作电流可能达到20A,此时续流二极管消耗的功率会很大,很容易导致发热烧毁。因此必须另外提供续流回路。
我们知道功率MOSFET,源级和漏级是可以互换的,因此可以将互补的桥臂驱动开启建立续流回路,从而大大降低功耗。但需注意,上桥在关断后,下桥不能立即开启来实现续流,而是需要插入一个死区时间以避免上下桥臂直通造成电源短路。79F081有6路pwm输出,内部集成上下桥死区控制,因此实现同步续流非常方便。
5.总结
采用上述方案做成的电动车控制器,无需外加门电路,CPU执行速度和ADC转换速度都足够满足电流闭环速度要求,PWM六路输出直接控制3相全控桥的6个晶体管。集成死区控制功能,因此很适合用在电动自行车控制器上,此方案实际测试效果不错,目前已经量产。
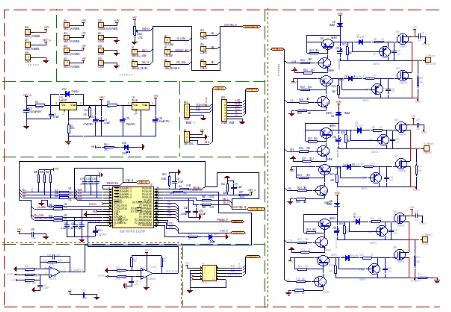
图3 方案原理图
- 基于单片机的倾角测量系统设计 (06-27)
- 由MSP430和CC1100构成的无线传感器网络(08-01)
- 无线传感器网络自组网协议的实现方法(08-01)
- 基于SOC/IP的智能传感器设计研究(09-08)
- 单开关实现小型微处理器系统的双功能(08-10)
- 六大特点助CMOS图像传感器席卷医疗电子应用(11-13)