基于ARM9的船载监测系统设计
0 引言
海岸带是海洋中对人类活动最为敏感的部分,人类活动会对其生态系统的结构和功能产生严重影响。这使得海岸带成为海洋生态环境脆弱区。因此,海岸带的安全与管理已成为国际热门研究领域。海岸带的科学管理是建立在大量数据的基础上进行的。传统的海岸带调查,需要大量的人力物力,而且获得的数据非常有限,高通量海岸带数据获取已成为制约海岸带科学管理的主要瓶颈。
以美国和欧盟为代表的海洋研究水平较高的国家,开发了多种形式的海洋监测系统,如浮标(Buoy)、拖曳式监测船(Tow)、水下滑翔机(Glider)、卫星遥感、海底观测站等,来获取海量数据。
在此,介绍一种新的海洋数据采集方法,并研制出一套采集系统--船载监测系统(Automated Instrument Packages on Ships of Opportunities)。它是一种将多种海洋环境监测传感器集成在一起,随船的航行,在沿线进行整条航线实时采样,获得数据既可直接通过
远程传输到数据中心,也可以将数据储存在船上,定期获取数据的一种海洋数据采集模式。
与其他海洋数据采集系统相比,船载监测系统有如下优点:
(1)能源充足。船舶可以为系统提供能源,便于更多复杂分析系统的应用,因此可根据不同功能需求,采用不同传感器,集成相应的船载监测系统。
(2)工作环境良好。船舶内部可保证系统工作条件,便于安装较为精致的设备。
(3)便于维护。不需辅助维修费用,维护成本低。
(4)数据来源广、准确度高,可获取不同时间和空间的数据参数。
综合以上优点,可以看到船载监测系统应用前景广阔。将系统放在不同航线上的商运船上,可建立我国整个海岸监测系统;如果放在远洋船上,则可得到大量的大洋表面海水数据。
1 系统原理
系统以ARM9为控制核心,由采样、测试、存储及发送等部分组成。系统启动后,由软件控制开启抽水泵,通过安装在贮水装置中的传感器测量海水pH、电导率、溶氧量、温度等参数,并由GPS获取位置参数,海水参数及位置参数存储在系统自带SD卡中,或经GPRS将数据发送到数据中心。数据中心的PC机或工控机由同样的GPRS接收数据,并由数据中心程序处理后,存储在数据库中。工作原理如图1所示。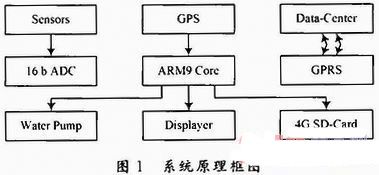
2 硬件设计
2.1 箱体设计
整个系统装于不锈材料的箱体内,可保护系统在一定恶劣天气情况下正常工作。箱体尺寸为555 mm×519 mm×454 mm,分为三层,上层为可推拉配电箱,中间层为贮水箱及水泵,下层放蓄电池。箱体上盖及前后壁可以向侧面打开,整体安装及移动方便。结构如图2所示。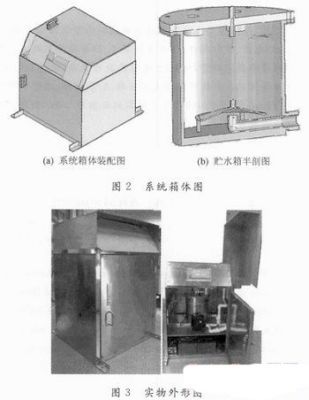
其中,配电箱固定在滑道上。上盖向侧面掀开后,配电箱可推向后侧,以便在不拆卸其他装置的情况下对下层设备进行拆装或调试。贮水箱有进出水口、上盖、锥形滤气罩等部件。如上图2(b)所示,海水由进水口通过内管通向锥形滤气罩,气体通过连接软管由上盖中心口通向排水管,由于流量因素,大量海水从锥形滤气罩下边沿流出,从而减少气体进入贮水箱,以防止其对传感器性能产生影响。上盖部分主要有出水口和传感器安装口。其中出气口定位在上盖的原因也是基于对减少贮水箱积留气体的考虑。上盖与贮水箱体之间加密封垫片,螺栓连接。系统整装实物外形图如图3所示。
2.2 电路设计
系统的电路部分由各功能电路组成,包括电源电路、A/D采集电路、采样隔离电路、串行通信电路以及ARM核心板等。其中ARM核心板为订购产品。
2.2.1 电源电路
系统所需电源情况复杂,包括直流24 V,±12 V,5 V,以及交流220 V等电源。所有电源由12 V 60 Ah蓄电池提供。其中,24 V及-12 V电源分别由电源模块实现;220 V交流电源采用逆变器转换得到。5 V电源使用2576-ADJ芯片与7805组合获取,如图4所示。
此电路负载能力强。先由负载能力较强的2576-ADJ将12 V电源降压到合适值(6.3~8 V),再由稳定性较好的7805得到5 V电压。这样既能满足高精度ADC电压要求,又减少了发热。
2.2.2 采集电路
16位高性能ADC芯片MAX11046占用ARM管脚GPIO资源情况如表1所示。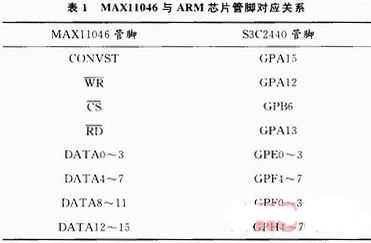
2.2.3 串口分时复用电路
由于高性能ADC占用了ARM 芯片部分GPIO资源,导致系统串口不够用,故采用模拟开关4052分时复用串口。不同型号模拟开关对串口信号的导通电压要求不同。其中,如使用HCF4052型号的模拟开关导通串口信号,需要10 V以上的电源,而使用74HC4052型号的开关只需5 V就可以导通。另外,串口芯片RS 3232可在3.3 V电压下工作,而RS 232则至少为5 V。串口分时复用电路如图5所示。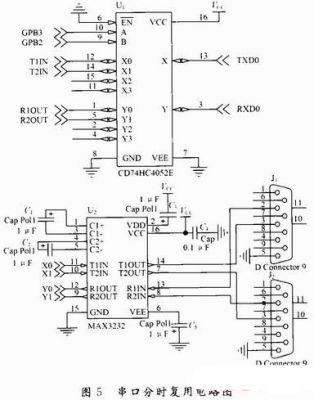
3 软件设计
3.1 ARM端程序编写
ARM9平台植入WinCE系统。该系统下运行应用程序由EVC编写。程序打开后,选择采集、存储及发送周期,并设置短信中心号码(有默认值)。点击开始后,系统开始自动工作。首先启动水泵,延时一段时间等待贮水箱装满水后,设定定时器,开始执行读取数据、处理数据、存储显示及发送数据等等操作循环。循环过程中如读到有短信进入,解析短信内容,如为协议指令,则执行并删除短信;若非协议短信,直接删除,继续执行循环。软件上有按钮可以直接结束系统工作。其工作流程图如图6所示。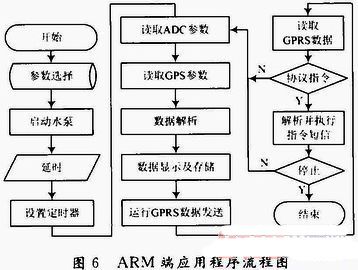
3.2 PC端编程
PC端程序是在Visual Studio 2010中使用C#编写完成,采用左树右表的机构,分为用户管理、终端管理和数据管理三个部分。程序连接了由SQL Server建立的数据库工程文件,该数据库工程包括用户表、终端表和数据表三类表单。
用户管理部分主要对用户表进行操作,可保存和更改不同用户信息,以判断用户对海洋数据的查阅以及系统操作的权限。
终端管理部分可对终端表和数据表进行操作,主要实现数据接收及存储。为实现数据中心可同时被多个船载监测系统通信管理,终端表中保存多个船载监测系统号码,便于海洋参数分类存储。数据管理部分可显示最新接收到的数据,并将一段时间内的数据以曲线输出,更直观地看到一定范围数据的变化趋势。而且该部分还可以将数据库中的数据以常用的文件形式数据,如Excel,PDF等格式保存。
数据中心与船载监测系统通信通过短信终端实现。短信终端与PC由串口连接,通过AT指令通信。软件中接收短信通过设置串口响应事件实现。发送短信程序流程图如图7所示。
- 基于WinCE的液位遥测系统软件设计(04-13)
- 基于WinCE的SPI接口驱动程序设计(08-03)
- 基于ARM9与WinCE的车辆GPS定位信息采集系统(08-14)
- 基于DSP+ARM的便携式电能质量分析仪设计(05-15)
- ARM7和ARM9双核平台的技术分析(02-27)