基于uC/OS-II的低速率语音编码器系统设计
引言
随着数字信号处理技术的发展,越来越多的数字信号处理芯片应用于各行各业。但是,以往多数的DSP 系统是基于流程图的设计方法,该方法设计的程序稳定性不高,流程中任意一个环节出错都将导致系统崩溃甚至死机。使用RTOS将对系统的稳定性有很大的改善。使应用模块化,可极大提高程序的可读性、可扩展性和可移植性。
TI公司的定点DSP处理芯片TMS320C54X是目前应用比较广泛的一种DSP芯片,具有功耗低、运行速度快等优点,适合低速率语音编码的应用。
uC/OS-II是一种免费应且源代码公开的实时内核,经过多年的实际应用,显示出强大的功能和巨大的商业价值。本文实现了uC/OS-II在TMS320C54X上的移植,并提出了在uC/OS-II的平台上的低速率语音编码器的系统设计方案。
uC/OS-II在TMS320C54X上的移植
要实现uC/OS-II的移植,主要改写以下三个文件
OS_CPU.H文件
包括定义数据类型、代码值界区的中断控制、堆栈增长方向变量、任务切换函数定义和变量声明。TMS320C54X中的堆栈数据类型为16位,定义为:
typedef unsigned int OS_STK
在TMS320C54X中所有的堆栈都必须用OS_STK声明。
RTOS在进入系统临界区之前必须关闭中断,退出临界区后再打开中断。uC/OS-II定义了两个宏来关闭/打开中断:OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()。
用OS_STK_GROWTH来设置,OS_STK_GROWTH为0表示堆栈从低地址向高地址递增;OS_STK_GROWTH为1表示堆栈从高向低地址递减,TMS320C54X中,堆栈地址是由高向低递减的。
在uC/OS-II中,OS_TASK_SW()用来实现任务切换。OS_TASK_SW()函数模拟一次中断过程,在中断返回时进行任务切换。
另外,还声明了一个8位变量,用来调用DOS的时钟节拍函数,在TMS320C54X中应该屏蔽掉。
OS_CPU_A.ASM文件
在此文件中,需改写函数:OSStartHighRdy()、OSCtxSw()、OSIntCtxSw()。
OSStartHighRdy (0)函数由Sstart()函数调用,功能是运行优先级最高的就绪任务。其过程为:获得优先级最高任务的TCB地址→设置堆栈指针→恢复任务环境→中断返回→运行新任务。在TMS320C54X中实现如程序列表1,其中,CONTEXT_RESTORE是将C54X中的寄存器出栈的宏定义,在此不再详述。
OSCtxSw()函数是一个任务级的任务切换函数。软中断向量指向此函数。在uC/OS-II中,如果任务调用了某个函数,而该函数的执行结果可能造成系统任务的重新调度,则在函数的末尾会调用OSSched()。OSSched()查找当前就绪最高优先级任务,如果不是当前任务,则找到该任务TCB的地址,并拷贝到变量OSTCBHighRdy中,然后通过宏OS_TASK_SW()执行软中断调用OSCtxSw()进行任务切换。变量 OSTCBCur始终包含指向当前运行任务TCB的指针。在TMS320C54X中实现如程序列表2。
OSIntCtxSw()函数与 OSCtxSw()函数类似,不同的是,OSIntCtxSw()函数进行中断级任务切换。中断可能引起任务切换,在中断服务程序的最后会调用 OSIntExit()函数检查任务就绪状态,如果需要进行任务切换,则调用OSIntCtxSw()。值得注意的是,产生中断后,CPU寄存器会自动被保存,所以,在此函数中不再进行环境保存。在TMS320C54X中实现如程序列表3。
OS_CPU_C.C文件
在此文件中,只需修改 OSTaskStkInit()函数。OSTaskStkInit()由任务创建函数OSTaskCreate()或OSTaskCreateExt() 调用,用来初始化任务的堆栈。OSTaskStkInit()与调用它的函数有三个参数进行传递:任务代码起始地址(task),参数指针 (pdata),任务堆栈顶地址(ptos)。为提高代码效率,此函数用汇编语言改写,在TMS320C54X中实现如程序列表4。
基于uC/OS-II的低速率语音编码器系统设计
本系统中,低速率语音编码器的功能有语音编码、语音解码、回波抵消、模拟接口、数字接口等。另外,为提高系统的稳定性,增加了空闲任务和监视任务。系统结构如图1所示。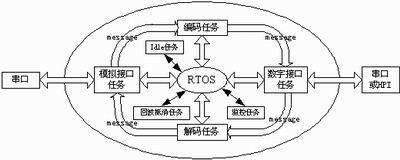
图1 系统结构图
系统由里向外分为三层:操作系统层、任务层、硬件层。
硬件层设计
硬件层设计主要包括串口和HPI口,用于接收(发送)语音信号和信道上的数据。
任务层设计
本系统中共有七个任务,其优先级从高到低依次为:监控任务、模拟接口任务、数字接口任务、回波抵消任务、编码任务、解码任务、Idle任务。各任务的状态有4种,即等待态和挂起态、就绪态、运行态以及中断态,状态的转换关系如图2所示。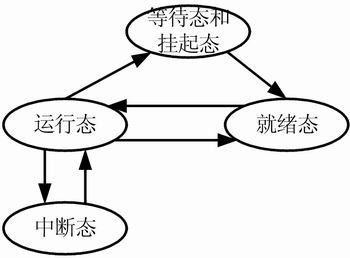
图2 任务状态转移图
监视任务设计思路为:被监视任务正常运行时其执行时间是可预估的,被监视任务在其即将运行完毕时向监视任务发送消息说明自身运行正常。被监视任务运行时,监视任务处于等待态,等待被监视任务给它发送消息,等待时间被设定
- 设计性能:物理综合与优化(04-28)
- 基于ARM+uCLinux的网络控制系统设计与实现(05-03)
- 嵌入式实时操作系统Nucleus PLUS在S3C2410A上移植的实现(06-09)
- 基于ARM7的新型嵌入式心电监护仪的研制(07-30)
- MOXA嵌入式计算机在变电站综合自动化中的解决方案(11-25)
- 爱特梅尔低功耗微控制器平台开发组合软件加速设计(02-05)