基于ARM的嵌入式航空拖靶高度控制器设计
时间:03-22
来源:电子设计工程
点击:
3 半实物仿真实验及结果
在自行开发的半实物仿真平台上,对研制的拖靶高度控制器样机进行了仿真验证。拖靶飞行动力学和运动学模型、无线电高度表信号、加速度计信号通过计算机模拟,再接入高度控制计算机、舵机等实物构成仿真回路。仿真步长为5 ms,仿真计算精度为64 b(双精度浮点)。仿真结果如图7~图10所示,本文给出了4种主要干扰条件下的结果,拖靶装订基准高度为15 m。
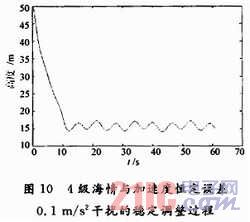
仿真结果表明,在垂风、母机高度偏差、拖靶初始高度偏差、四级海情产生高度表噪声影响和加速度计测量误差影响的情况下,系统能够控制拖靶平稳进入定高飞行状态,受到干扰偏离基准高度后,高度控制器能进行快速修正,使拖靶能够很快回到预定基准高度,并按精度要求保持在预定高度飞行,系统静动态响应指标满足设计要求,控高精度均可达2 m。
4 结语
本文采用嵌入式技术设计的航空拖靶高度控制器,可控制拖靶实现超低空、高精度的掠海定高飞行,达到了设计目标。设计中以ARM7嵌入式微处理器为核心进行了硬件研制,并基于μC/OS-Ⅱ实时嵌入式操作系统进行了应用软件开发,将嵌入式技术及其优点成功应用于该控制器的研制,取得了较好的效果。
- 基于STM32的数字PDA系统的设计与实现(05-19)
- 基于AT91S的表面肌电信号采集仪的软硬件设计与实现(08-05)
- 基于ARM7核处理器VxWorks系统BSP设计 (02-27)
- ARM7和ARM9双核平台的技术分析(02-27)
- LPC2294的实时时钟显示工程设计分析(05-03)
- 基于ARM7的新型嵌入式心电监护仪的研制(07-30)