基于ARM的嵌入式航空拖靶高度控制器设计
引言
航空拖靶是一种由飞机拖曳飞行的特殊的无人飞行器,一套完整的拖靶系统主要包括拖带飞机、收放缆装置、拖缆和拖靶。其中拖带飞机一般为有人或无人驾驶飞机,收放缆装置一般为挂装在飞机上的电动或气动式绞车,拖缆是通过绞车收放的一根长约几千米而直径只有几毫米的钢缆,拖靶多为外形类似导弹的无动力飞行器,由拖缆牵引飞行。主要用途是模拟敌方来袭的导弹类目标,为己方对空导弹、火炮等防空武器系统试验或训练提供模拟目标。
随着技术的进步,现代反舰导弹多采取"超低空掠海飞行"的突防方式。与之相应,20世纪80年代以来,用于模拟反舰导弹类目标的航空拖靶,也向着这一方向快速发展。而这类拖靶都要装有高度控制器,才能实现模拟导弹的超低空掠海定高飞行能力。其中,高度控制器是核心设备,控制精度、实时性和可靠性都有较高要求。同时,伴随着计算机技术的快速发展,以应用为中心的"嵌入式系统"以其实时性好、可靠性高、体积小、重量轻、成本低和软硬件可裁减等优势,正在被广泛应用于各个领域。因此,考虑到拖靶高度控制器的设计要求与嵌入式系统的应用场合非常符合,本文基于ARM7嵌入式微处理器和μC/OS-Ⅱ嵌入式实时操作系统,设计开发了航空拖靶的高度控制器。
1 控制器组成和工作原理
高度控制器主要由无线电高度表、垂向线加速度计、控制律解算主板、舵机驱动控制板及舵机组成,其中加速度计、控制律解算主板和舵机控制板集成在一个高度控制计算机盒内,其组成如图1所示。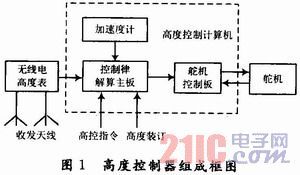
高度控制计算机是系统的中枢,它接收无线电高度表信号和加速度计信号。控制律解算主板首先对这2路信号进行抗混频滤波和电平转换等前置处理后送入A/D通道,再进行控制律解算,给出升降翼偏角的PWM控制信号至舵机驱动控制板,经舵机驱动控制板放大输出驱动舵机,舵机驱动升降翼来调整拖靶的飞行高度。系统每20 ms进行一次控制律解算。工作原理框图如图2所示。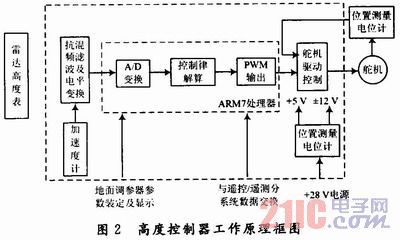
2 控制器软硬件设计
高度控制器的设计主要包括3个部分的内容:高度控制计算机控制律解算主板的设计、高度控制计算机舵机驱动控制板的设计、传感器与执行机构的选型及配置设计。其中,控制律解算主板是整个系统的核心,因此,全系统的设计也是围绕这个核心进行的。
2.1 控制律解算主板
(1)硬件设计。高度控制律解算板主要功能是在收到开高控指令时,对接收到的无线电高度表信号和采集到的加速度计信号以及设定的飞行高度值按照控制律实时解算出升降翼偏转角(周期为20 ms),并变换成相应的PWM占空比送给舵机驱动控制板实现对升降翼偏转角控制;同时还具有装定拖靶定高飞行高度值、对无线电高度表输出进行调零、对加速度计输出进行调零和比例调整、对升降翼偏转角进行调零和比例调整、接收遥控遥测分系统开/关高控指令和向其实时传送拖靶状态参数等功能。控制律解算主板采用基于ARM7的嵌入式微处理器设计。高度控制律解算板的原理框图如图3所示。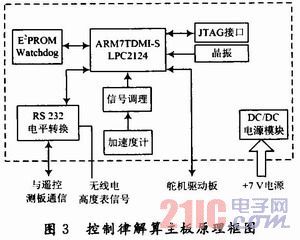
这里所选用的中央处理器是ARM7TDMI-S体系结构的32位微处理器芯片LPC2124。该处理器集成有16 KB的内部RAM和128 KB的内部FLASH存储器,这些资源能够满足μC/OS-Ⅱ嵌入式实时操作系统的运行要求。除此之外还集成有2路UART串口、4路10位A/D转换器、1个I2C接口、2个SPI接口、6路PWM输出以及多路通用I/O口,分别用于与地面调参器通信进行高度装定及其他参数的校正、与雷达高度表通信以获取高度值、对加速度计输出进行AD采样、与小容量的E2PROM芯片进行数据读/写以修改和保存设置的参数、控制舵机工作等功能。选用该芯片可以极大地简化外围电路的设计,缩小电路板尺寸,提高系统运行的可靠性。
(2)软件设计。高度控制律解算板中的应用程序是运行在嵌入式实时操作系统μC/OS-Ⅱ下,该系统具有可移植、裁剪、源代码公开、多任务和基于优先级的抢占式任务调度等特点,实时性好,可靠性高。应用程序分解为任务优先级不同的6个任务,每个任务都是一个无限循环程序,任务间通过信号量、邮箱或者其他事件来传递。按任务优先级依次递减分别是主任务(目标板初始化和建立其他任务,任务优先级最高)、串口0接收数据任务、串口1接收数据任务、执行定高指令任务、慢速数据采样任务、串口0发送数据任务。
应用程序首先运行主任务(见图4),在执行延时20 ms等待操作时操作系统自动执行较低任务优先级的任务,在这里即为串口0接收数据任务,这个任务的功能是接收遥控/遥测分系统发送来的指令数据或者是调参器发送来的其他指令,当接收到开高控指令时则设置开高控标志位,在没有继续收到数据时则执行较低任务优先级的任务,即串口1接收数据任务,这是接收无线电高度表发送来的高度值并更新相应的高度全局变量。执行定高指令任务(见图5)是由主任务通过发送开高控信号量来启动的,当串口0接收数据任务设置了开高控标志位后,主任务便每间隔20 ms启动一次执行定高指令任务,利用上次的解算结果及当前的垂向加速度值和高度值进行控制律解算,得出升降翼偏转角并换算为相应的PWM占空比送给舵机驱动板控制舵机的偏转。慢速数据采样任务是1 Hz的速率采集靶载蓄电池的电压、加速度以及无线电高度表等值并更新相应的全局变量。串口0发送任务是以5 Hz的速率向遥控遥测板发送拖靶的参数值,包括靶载蓄电池电压、加速度值、无线电高度表值、设定高度值以及解算出的舵偏角值等。下面给出的是主任务程序框图和执行定高指令任务程序框图。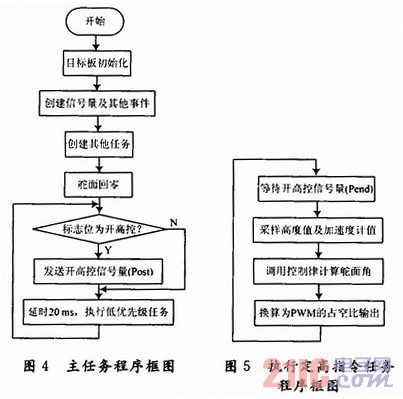
2.2 舵机驱动控制板
舵机驱动控制板和电动舵机以及位置反馈电位计构成了拖靶的舵机系统。舵机系统采用双闭环即电流环和位置环的控制结构。电流环作为内环,用于抑制转矩和电流的波动,减小功放死区,提高线性度。位置环是舵机系统的主回路,目的是保证较好的位置控制精度。由于拖靶自身的稳定性较好,故舵回路不采用速度环,而引入适当的微分器,以改善系统阻尼,提高系统刚度,减小各种非线性因素的影响。舵机系统结构框图如图6所示。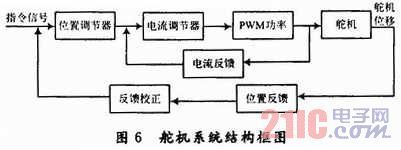
舵机驱动控制板包含采用模拟电路实现的位置调节器、电流调节器、PWM功放和反馈校正网络。考虑到舵机系统的响应速度,位置调节器和电流调节器均采用简单的比例式调节规律,由模拟集成运放AD822AN实现。位置反馈是舵机系统的主反馈,升降翼面的定位精度主要取决于位置传感器的精度。标准电阻是小功率系统中常用的一种电流传感器,因其简单可靠、阻值稳定、精度高、频响好、输出标准电压直接比例于所通过的电流,因而在PWM系统中得到了广泛应用,故采用标准取样电阻作电流传感器。舵机驱动控制板围绕直流电机驱动器专用集成电路L292设计了其外围电路,L292是一种PWM直流电机驱动器专用集成电路。与线性功放相比,PWM功放具有功耗低、效率高、工作稳定可靠等优点,尤其是它的动力润滑作用,对减小舵机死区,改善静态精度和低速爬行非常有利。它的驱动能力强,可达2A/36V,集成度高,开关频率可外部设定,片内设有过载保护和欠压保护等功能。
2.3 传感器与舵机执行机构配置
(1)无线电高度表。采用调频/连续波(FM/CW)体制,工作频率4 200~4 400 MHz,测高范围0~300 m。高度输出形式为232数字信号或模拟电压输出两种格式,周期为20 ms。两种输出格式可通过发送指令进行选择,这里使用的是精简格式,一帧数据为4 B,前2 B和后2 B表示同一高度值,低位在前,高位在后。
(2)加速度计。加速度计安装在拖靶的重心位置,集成在高度控制计算机机盒内,用于测量拖靶的垂直方向加速度,选用ADXL105AQC加速度计芯片,精度±1g~±5g,单通道模拟输出,分辨率2 mg。工作电压为单电源2.7~5.25 V,具有自检功能,芯片自带温度传感器模拟输出,还带有运算放大器,10 kHz的工作带宽。
(3)舵机及执行机构。包括力矩舵机、螺旋传动机构、摇臂和直滑式位移传感器。舵机采用齿轮减速永磁直流力矩电机,额定转矩0.3 nm,额定电流0.3 A,额定电压27 V,额定转速(80±8)r/min,空载转速90 r/min。舵机以螺旋传动方式来操纵舵面,同时靠摇臂带动直滑式导电塑料位移传感器反馈升降翼面偏转角度。这里的位移传感器选用直滑式精密导电塑料电位器做位置传感器,其行程为3 cm,阻值为2 kΩ,独立线性度为0.1%。
- 基于STM32的数字PDA系统的设计与实现(05-19)
- 基于AT91S的表面肌电信号采集仪的软硬件设计与实现(08-05)
- 基于ARM7核处理器VxWorks系统BSP设计 (02-27)
- ARM7和ARM9双核平台的技术分析(02-27)
- LPC2294的实时时钟显示工程设计分析(05-03)
- 基于ARM7的新型嵌入式心电监护仪的研制(07-30)